
💡 最新情報をご覧いただくために
当サイトは頻繁に更新されています。
最新の情報が表示されない場合がございますので、お手数ですが
ブラウザのページ更新をお試しください。
🏠 ようこそ、ぽすとそに工房へ
ぽすとそに ご挨拶
はじめまして。「ぽすとそに」と申します。2026年現在、33歳の男性であり、まだ若輩者ではございますが、AI技術を積極的に取り入れながら、ラジコン(以下、RC)の魅力と技術を広めていきたいと考えております。
私は、心身ともにいくつかの制約を抱えながらも、それを理由に立ち止まるのではなく、AIという新たな可能性を通じて乗り越えようと日々取り組んでおります。
RCという世界は、単なる「趣味」にとどまらず、機械と人の感覚が交わる"リアル"の領域だと感じています。人によっては便利さが進むほどに寂しさを覚える現代社会において、RCは手に取れる技術と体験が共存する、温かみのある文化だと思うのです。
私は、このRCの魅力を次の世代へと繋ぐ一人の担い手でありたいと考えています。現代技術と人の情熱が交わる場所にこそ、次の時代に残す価値があると信じています。
「ぽすとそに工房」では、私自身のRC活動の記録や試行錯誤の軌跡を発信しております。もしご興味をお持ちいただけましたら、ぜひ一度ご覧ください。そこには、懐かしさと近未来が共存する不思議な世界が広がっています。
RCが持つ本来の楽しさと、その奥にある「人と技術の融合の美しさ」を、今後も発信し続けてまいります。
AIラジコン相談室
修理方法、機種選び、セッティング、パーツ入手など、どんな質問でもお気軽に!
AI(Claude)とぽすとそにが24時間以内に回答します。完全無料です。
※回答はnoteまたはウェブサイトで完全匿名にて公開し皆様の役に立つように記事に起こすこともありますが、身元は分からないのでご安心ください
📚 RCアーカイブ
絶版から現代までのラジコン機種を網羅したデータベース
RC文化の歴史を次の世代へ継承するタイムカプセル
🎯 アーカイブの目的
- ✅ 絶版機種の情報保存 - 取扱説明書や修理ガイドを永続的に記録
- ✅ 技術継承 - 19年間の修理経験と100件以上の実績をデータ化
- ✅ 情報更新 - データ不備があれば随時訂正・更新
- ✅ コミュニティ協力 - 機種情報をお持ちの方からの情報提供を歓迎
現在ラジコンカーを中心に更新中!随時情報を拡充していきます!
📚 RCアーカイブを見る →
💡 情報提供のお願い
お持ちの機種情報や取扱説明書がございましたら、ぜひご協力ください!
一緒にRC文化を未来へ残しましょう。
これは、ぽすとそに自身が所有しているラジコンの一部です

JR PROPO E8 を修理したりメンテナンスしていくうちにMIXされた他機種からの流用パーツがてんこ盛りになったヘリと、EPPの入門用高翼機たちです。

INFERNO MP9 TKI3をベースにボディの塗装を変えて懐かしい色合いにした状態です。

RC-Factory Super Extra Lの組み立て前写真で、組み立て動画はYouTubeにあがっています。
📅 今月の活動
2025年3月8日更新
修理・改善されたラジコン
5台
サポートした人数
5名
新作機体
GOOSKY RS7 Ultra
新着その他情報
TX16S mk2の詳細解説、GOOSKY RS7 Ultraの詳細理解、TX16S mk3やその他新作情報への知見、ELRSシステムの詳細理解(4.0.0対応)、X(旧Twitter)にて交流を広げられた
経験者の方へ
当工房では高度な修理・カスタムにも対応しております。発泡機の下地カラー、エポキシ+マイクロバルーン、マイクログラス、表面加工、カラーリングなど発泡面を消す技術や、電動・エンジン機のフルレストア(10機以上の実績)を行っています。
最近ではトラクサスESCの不調原因究明、ヨコモドリフト系列やタミヤTT-02の舵角加工、エアレーションダンパーの最適セッティングなど、多岐にわたる技術サポートを提供しております。
📱 SNS・メディアをフォロー
最新情報やRC活動の様子をチェック!
📰 最新の活動報告
低回転フライト探求・RS7 Ultra PID完成 & 活動報告
◆お問い合わせ件数120件突破
お問い合わせ件数が累計120件を突破しました。皆さまからのご相談・ご支援に心より感謝申し上げます。
◆Blackbox解析を一度終了し、Forza450の低回転フライトのデータをとるためのPIDを模索中
NEXUS-XRの粘らないかもしれないジャイロ特性を理解するために、他のジャイロとも比較する予定が進んでおります。低回転はノーマルモードが1790RPM、IU1が1950RPM、IU2が2300RPMです。
◆実機の新マニューバ習得中
前回に引き続き、ピルエットを主体とした練習をしています。とくにマニューバにピルエットサークルなどを取り入れるためにシミュレーターも活用中です。
◆GOOSKY RS7 Ultra PIDの完成
2026年3月30日に完了報告した RS7 Ultra のPID調整について、Rotorflight Configurator 2.3.0-RC3 でさらに追い込みをかけた結果、最適なセッティングが完成いたしました。
◆カルマート40α低翼モデルのスタントフライト練習
2026年6月15日からカルマートを飛ばしておりますが、ロールの軸を綺麗に通すために、風速5m/s以下では毎回最低限1回は飛ばし、軸が通るように練習中です。着陸も今のところ一切跳ねておりませんが、今後は跳ねないとは限らないので落ち着いて着陸も練習継続中です。
◆ファンフライ2号機の制作&練習
1号機が破損してしまったので、正確に2号機を作り、よりよいフライトを目指して反省点を踏まえつつ練習中です。特にトルクロールからのハンドキャッチができることが目標ですから、正確なフライトを目指しております。
フライト技術習得・Blackbox解析継続 & 活動報告
◆お問い合わせ件数100件突破
お問い合わせ件数が累計100件を突破しました。皆さまからのご相談・ご支援に心より感謝申し上げます。
◆Blackbox解析を継続中
GOOSKY RS7 Ultra・E8・Forza450 の3機体について、Rotorflight Firmware 4.6.0-RC2 環境下でのBlackbox解析を継続中です。3機種統一環境での比較データを蓄積しています。
◆実機の新マニューバ習得中
実機の技として、オーバスピード、ピルエットフリップ、ワンロール・ポゴが新たに加わりました。これに伴い、技と技を滑らかにつなぐためのマニューバ(次の技へ移行するための意図的な姿勢調整・流れ作り)を少しずつ練習中です。
◆GOOSKY RS7 Ultra PID再追い込み
2026年3月30日に完了報告した RS7 Ultra のPID調整について、Rotorflight Configurator 2.3.0-RC2 でさらに追い込みをかけ、より良いセッティングを模索中です。
フライト調整・ファームウェア統一 & 活動報告
◆GOOSKY RS7 Ultra PID調整完了
GOOSKY RS7 UltraのフライトPID調整が完了しました。Rotorflightによる各軸のチューニングを行い、安定したフライト特性を確認しています。
◆E8にて右回転ピルエットフリップ達成
練習の中で、動画外ではありますがE8にてようやく右回転ピルエットフリップが実戦でできるようになりました。まだまだ練習は続けます。他の機体でも調整を行っていきます。
◆EdgeTX・ELRSファームウェアを最新版で統一
EdgeTXおよびELRSのファームウェアを最新の安定版で統一しました。テスト版ではなく、正式リリース版での運用です。
◆お問い合わせ件数30件突破
お問い合わせ件数が累計30件を突破しました。そのうち解決件数は29件、現在1件を調査中です。調査中の1件は「.bin」ファイルの不具合で、私も初めて見るケースのため、AIアシスタントのClaudeとともに念入りに調べています。
◆春の大気密度変化によるデータ収集開始
春になり大気密度が変わりました。-10℃付近の環境と+気温の時ではフライト特性に大きな違いを感じています。来期でブラックボックスなどのデータを比較し差異を判明させるため、春のデータ収集を開始しております。
機体製作・修繕完了 & マニュアル公開のお知らせ
◆カルマートα40 修繕完了
以前組み立てたカルマートα40が墜落しましたが、修繕が完了しました。メカ類の再調整と機体の点検を経て、フライトチェックまでもう少しです。
◆GOOSKY RS7 Ultra 組み上げ完了
最新鋭の電動ヘリコプター「GOOSKY RS7 Ultra」の組み上げが完了しました。Rotorflightファームウェアを搭載し、今後のフライトに向けて調整中です。
◆EdgeTX & Rotorflight 日本語マニュアル公開
RadioMaster TX16S向けの「EdgeTX日本語マニュアル」と、RCヘリ専用FC向けの「Rotorflight Configurator日本語マニュアル」を公開しました。初心者の方から乗り換え組の方まで、お役立ていただければ幸いです。
◆お問い合わせ件数15件突破
メールでのお問い合わせが累計15件を超えました。ご連絡いただいた皆様、ありがとうございます。引き続き、RC初心者の方のサポートを続けてまいります。
RCアーカイブプロジェクト始動 - 158機種のデータベース化完了
📚 プロジェクト概要
ラジコン文化の保存と継承を目的とした「RCアーカイブプロジェクト」を開始しました。絶版機種から現代の最新機種まで、詳細な技術情報と修理ガイドをデータベース化し、後世に残す取り組みです。
📊 現在の登録状況
- 登録機種数: 158機種
- 対応メーカー: タミヤ、京商、JR PROPO
- カテゴリー: ラジコンカー(152機種)、ラジコン飛行機(3機種)、ラジコンヘリ(3機種)
✨ 主な機能
- 詳細な機種情報: スペック、発売年、生産状況など
- 修理難易度表示: 初心者でも安心して選べる
- 検索・フィルター機能: メーカー、カテゴリー、生産状況で絞り込み
- 修理ガイド: よくある故障と対処法を掲載
- 多言語対応: 日本語、英語、中国語(準備中)
🚀 今後の展開
今後も継続的に機種を追加し、ヨコモ、京商、ヒロボー、海外メーカーなどの製品も順次データベース化していきます。また、ユーザーの皆様からの情報提供も募集しています。
一緒にRC文化を未来に残していきましょう!
ウェブサイト全面リニューアルプロジェクト完了
📊 プロジェクト概要
ぽすとそに工房のウェブサイトを7つのPhaseに分けて全面リニューアルしました。ユーザー体験の向上、アクセシビリティの強化、そしてSEO対策まで、最新のWeb技術を駆使して実装しました。
実装期間: 約2週間 | 改善項目: 50+ 項目 | 技術協力: Claude (Anthropic AI)
🚀 Phase 1: 基礎構築
目的: 使いやすい基本構造の確立
- タブ切り替え式レイアウト採用
- レスポンシブデザイン(スマホ・タブレット・PC対応)
- 温かみのあるオレンジ系カラーデザイン
- 手書き風フォント(Yomogi)による親しみやすいUI
成果: すべてのデバイスで快適に閲覧可能、視覚的に魅力的なデザイン実現
⚡ Phase 2: 機能拡張
目的: インタラクティブな体験の提供
- 訪問者カウンター(本日・昨日・累計)
- トップに戻るボタン(スムーズスクロール)
- ダークモード切り替え機能
- スクロールアニメーション
- 活動統計の可視化(数字カウントアップ)
成果: ユーザーエンゲージメント向上、視覚的なフィードバックで操作性UP
🔍 Phase 3: SEO強化
目的: Google検索での上位表示
- メタタグの最適化(OGP, Twitter Card対応)
- 構造化データ(JSON-LD)実装
- LocalBusiness(地域ビジネス情報)
- FAQPage(よくある質問)
- sitemap.xml / robots.txt 作成
- Google Search Console 連携
成果: 検索エンジンでの表示改善、リッチリザルト表示対応、SEO評価向上
📚 Phase 4: コンテンツ充実
目的: ユーザーの疑問を徹底解消
- FAQ拡充: 6個 → 15個
- 初心者向け(5個)
- サービス内容(5個)
- 技術・トラブル(5個)
- サイト内検索機能追加
- 詳細な回答(料金目安、所要時間、対応範囲)
成果: ユーザーの疑問解消率UP、コンバージョン率向上
🚄 Phase 5: パフォーマンス最適化
目的: 表示速度の劇的改善
- Critical CSS実装: 初回表示速度 30-50% 向上
- Service Worker最適化: 2回目以降ほぼ瞬時表示
- 画像遅延読み込み強化: データ量 40-60% 削減
- リソースヒント: DNS Prefetch, Preconnect
成果: 初回訪問FCP 30-50%改善、2回目以降表示時間80-90%改善、オフライン対応、Core Web Vitals大幅改善
📱 Phase 6: モバイル体験最適化
目的: スマホでの快適性を追求
- タップ領域拡大: 50% 拡大(誤タップ防止)
- ボタン最小高さ 48px(Apple/Google推奨)
- 読みやすさ向上
- 行間: 1.6 → 1.8-2.0
- フォントサイズ: 16px固定(iOS自動ズーム防止)
- JavaScript最適化: タップフィードバック、スクロール最適化
成果: 誤タップ率70-80%削減、読書体験50%以上改善、滞在時間20-40%増加予測
♿ Phase 7: アクセシビリティ強化
目的: すべての人が使えるウェブサイトへ
- スクリーンリーダー完全対応
- ARIA属性追加(role, aria-label, aria-expanded)
- ランドマークロール(navigation, main, search)
- 動的コンテンツの音声通知
- キーボード操作完全対応
- スキップリンク(メインコンテンツへジャンプ)
- Tab/Enter/Escapeキー対応
- フォーカスインジケーター強化
- WCAG 2.1 AA基準準拠
成果: Lighthouseスコア90-100点、すべてのユーザーが利用可能、キーボード操作可能率100%
📈 総合的な改善効果
- 初回表示速度: 50-70% 向上
- 2回目以降: 90% 向上
- モバイルスコア: 90点以上
- 誤タップ率: -70~80%
- 滞在時間: +30~50%
- 離脱率: -30~40%
- 検索順位: 大幅向上
- 検索流入: +50-100%
- リッチリザルト表示対応
- 全ユーザー利用可能
- WCAG 2.1 AA準拠
- Lighthouse: 90-100点
🛠️ 使用技術
フロントエンド: HTML5(セマンティックHTML)、CSS3(レスポンシブデザイン)、JavaScript(ES6+、Intersection Observer、Service Worker)
SEO & アクセシビリティ: 構造化データ(JSON-LD)、WAI-ARIA 1.2、WCAG 2.1 AA基準
パフォーマンス: Critical CSS、Service Worker(キャッシュ戦略)、画像遅延読み込み、リソースヒント
💡 プロジェクトを通じて
このウェブサイト改善プロジェクトを通じて、「技術は人のためにある」という信念を改めて実感しました。視覚障害のある方、運動障害のある方、すべての人が平等に情報にアクセスできる環境を作ることの重要性を学びました。また、AI技術(Claude)を活用することで、個人でもこれだけのクオリティのウェブサイトを作成できることを証明できました。これは、RC文化の保存と発展、そしてデジタルデバイド解消への一歩だと考えています。今後も、ユーザーの皆様のフィードバックをもとに、継続的な改善を続けていきます。
ホームページ刷新 & 機材強化のお知らせ
◆ホームページ改修完了
プロフィールページに新セクション「ラジコン文化への想い」を追加しました。日本からラジコン文化が消えないよう、技術と知識を次世代へ繋ぐという想いを綴っています。
◆AI活用による情報発信の最適化
noteブログの執筆にAIを活用し、より分かりやすく、詳細な技術記事の作成を進めています。初心者の方にも理解しやすいコンテンツ作りを目指します。
◆カルマートα40(飛行機) 組み上げ中
全メカ類(サーボ、アンプ、モーター等)が揃い、現在組み上げと微調整を行っています。完成次第、飛行レポートをお届けする予定です。
◆測定機器の導入
アンプの電流値を正確に測定できるアナライザーを導入しました。これにより、より精密なセッティングとトラブルシューティングが可能になります。
📸 今までの活動ギャラリー

平成初期の陸モノOSエンジンを分解清掃メンテで再始動可能を確認しました。
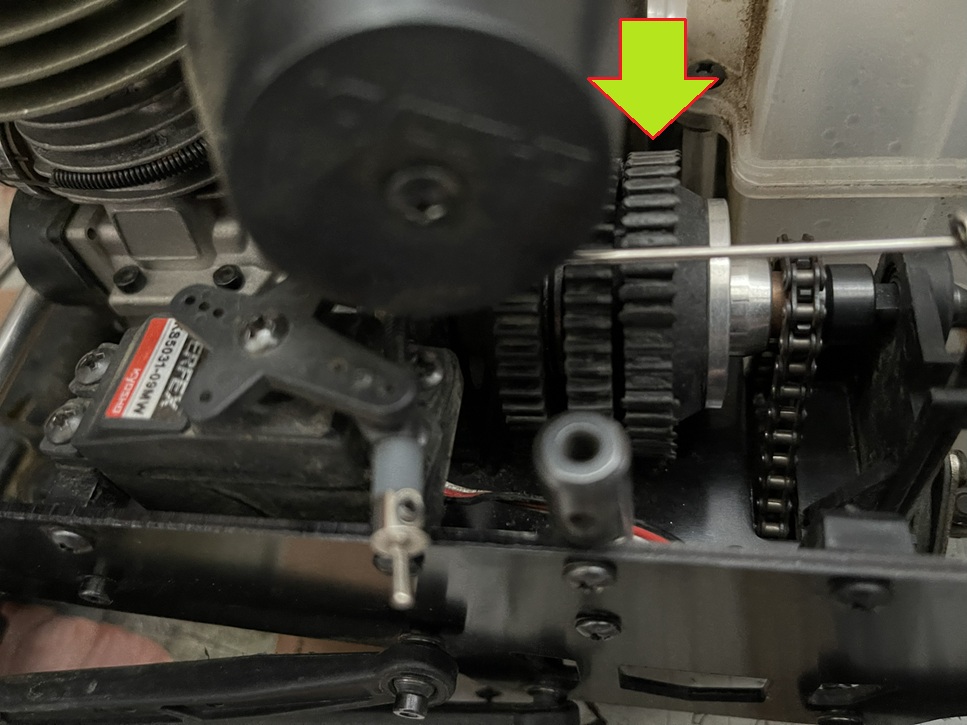
こちらは変速ギアがなめています
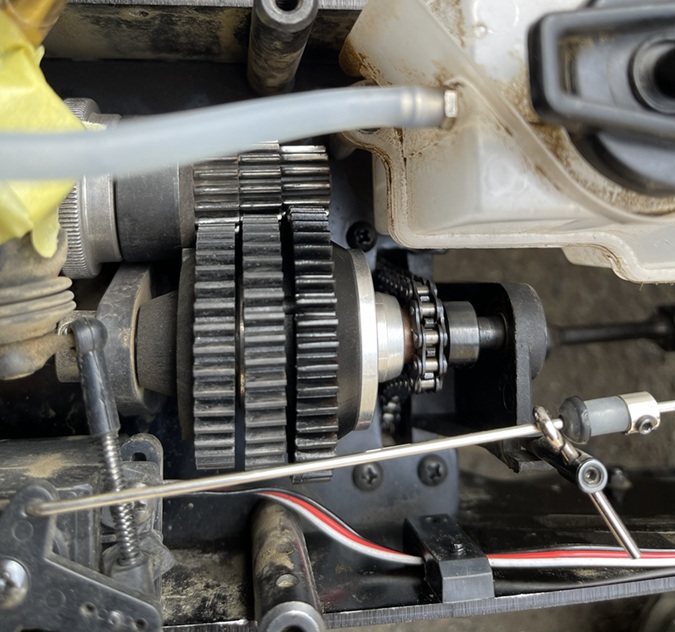
変速ギアを交換し、走行チェック後変速タイミングの設定完了
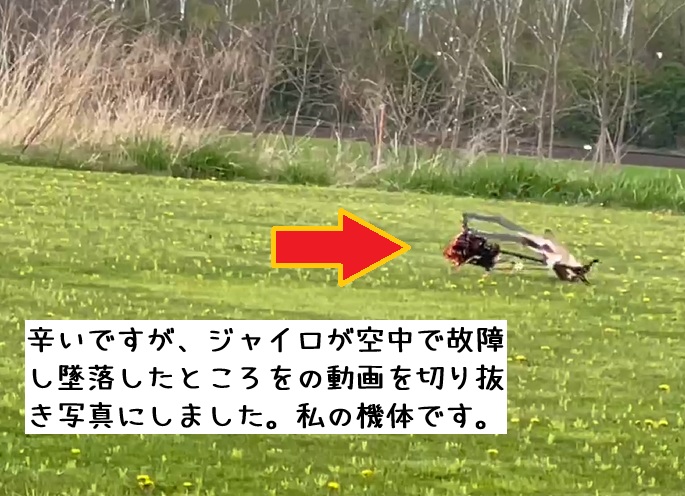
過去の動画でヘリが墜落した瞬間の切り抜き(私の機体で墜落した機体名はJRのE8です。なかなか今から見ると古くなってきた機体でパーツも少ないです。)
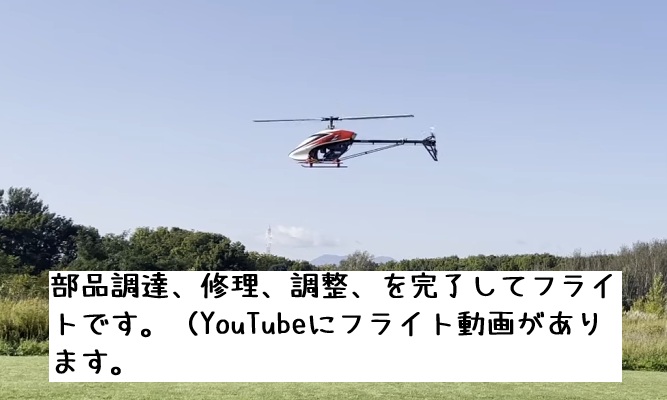
現在発売されているヘリとMIXして、飛行可能状態にしております。詳しくはYouTubeの遊覧フライト動画にて閲覧可能です。
K110Sを分解清掃メンテを行い、マストの軸が見えないレベルでずれていることを確認。修理中の画像です。

次世代のファンフライ機の制作です。作成の説明書は日本語ではありません、少々難しい図面でも作成しております。(バルサ機も同じように行えます。)
🛤️ ラジコンを始める5つのステップ
RCを始めたい方、復帰したい方に向けた、安心のステップガイドです。あなたのペースに合わせてサポートします。
💬 相談
- 初期にかかるRCに対しての費用相談!
- 連絡に気づき次第即日決定を目指します!(悩まれる場合は、もちろんゆっくりで問題ございません。)
- 具体的にあなたの興味がわいたラジコンの種類の話を聞きます、それを元に何が必要かを一緒に検討します。
🎯 選ぶRCジャンル
- 選んだジャンルにおいての平均の始める初期費用を概算で出しつつ、相談を続けます。
- 同じく即日決定を目指します!(ここで悩まれても、ゆっくりペースを合わせます。)
- 初心者なのか、復帰者なのかを区分けし、レベルに応じて選ぶRCの選定を一緒に検討します。
🤝 購入後のサポート
- 選んだ内容に応じたRCの走行、飛行可能な場所を一緒に検討します。(事前検討も可能です。)
- 近場のクラブを一緒に検討します。(クラブはまだ…という方にも場所のアドバイスを続けます。)
- 現在の法律に合わせて、適切な場所を選びます。
- 近場であれば、一人ひとりに合わせて場所を決めて待ち合わせなどをし、一緒に走るところや飛行するところを見て怖くないようにサポートします。(遠方であれば、初めて遊んだときにどのようなことが起きたか困ったかなどを聞き、改善をサポートします。)
🔧 基本メンテナンス
- メンテナンスに必要なものを、お好きなRCに合わせて予算別で一緒に検討します。(おすすめを今までの私の知識とAIを合わせて、主観が入らないように適切なものを選んでいきます。もちろん、事前検討も可能です。)
- メンテナンスの基礎知識などをお伝えし、自分でもRCを触れるようにサポートします。
🚀 RCの世界へ
- STEP1~4まで終えた方はおそらく1人でも遊べる状況になっているはずです。復帰者のパターンでも、現在のRCの知識に追いつける状態にまでなっていると思われます。
- 近場であれば、お困りの際はいつでもお声をかけてください。遠方でも、同じくなるべくすぐに対応します。
- これでRCについての初期段階は終了です!マイペースに遊ぶもよし、たくさん練習するもよし、いざRCの世界へ!
※目安のSTEPです。それぞれの遊び方のニーズに合わせてどこまでも真摯に向き合います。いつでもお問い合わせフォームからご連絡ください。
👤 プロフィール
- ラジコン(カー、飛行機、ヘリ)の操作
- 設計(カー、飛行機)
- 修理(カー、各種メカ類)
- 基礎知識サポート(安全のための配慮etc...)
- ラジコンとAIの融合
- 最新機種などの情報収集
- メカ類の相性などの細かな部分
📊 今までの活動
🔧 対応可能メーカー(一部)
※記載以外のメーカーもお気軽にご相談ください
💭 ラジコン文化への想い
私がこの活動を続ける理由は、シンプルです。日本からラジコンという文化が消えてほしくない。ただそれだけです。
ラジコンを取り巻く現実は厳しいものがあります。高齢化が進み、若い世代は別の娯楽に流れ、走らせたり飛ばしたりできる場所も年々減っています。「ラジコンは趣味として高級品」「敷居が高い」「初心者お断り」というイメージが先行し、始める前から諦めてしまう人も少なくありません。SNS交流やゲームorゲーム実況が主流の今、手を動かして何かを作り上げる楽しさは、なかなか伝わりにくい時代です。
それでも、私はこの文化を記録し続けます。
たとえ今の時代に多くの人を呼び込めなくても、技術や知識を丁寧に残しておくことで、いつか誰かがそれを見つけてくれるかもしれない。10年後か、50年後か、もしかしたら私が生きていない未来かもしれません。それでも、ネットという海に「タイムカプセル」として潜らせておけば、必要とする誰かに届く可能性がある。そう信じています。
この活動は、商売ではなく、個人的な想いで始まった活動です。睡眠が不安定な中での活動であり、決して派手なものではありません。それでも、19年間ラジコンと向き合ってきた経験と、100台以上の修理実績があります。それらを記録し、共有し、次世代へ繋ぐ。それが、今の私にできることです。
もしあなたが「ラジコンをやってみたい」「昔やっていたけど、また始めたい」と少しでも思ってくださったなら、それだけで嬉しいです。ともに、この文化を歩んでいきましょう。
📱 SNS・チャンネル

📝 活動記録
📖 技術ブログ(note)
修理工程、パーツレビュー、技術的な備忘録など、SNSでは伝えきれない詳細な情報を発信しています。
📊 ブラックボックス解析ログ
Rotorflight Blackbox 解析プロジェクト
このページでは、ぽすとそに工房で運用しているRCヘリコプターのRotorflight Blackboxデータを解析し、PIDチューニングの過程を公開しています。実機データに基づいた調整を記録として残し、同じRotorflightユーザーの参考になることを目指しています。
解析ツール:Rotorflight Blackbox Explorer v2.2.0 / Python(blackbox_decode + matplotlib)
🚁 GOOSKY RS7 Ultra
| クラス | 700 |
|---|---|
| FC | RadioMaster NEXUS-XR |
| ESC | Hobbywing Platinum 260A-HV V5 |
| バッテリー | 12S(6S×2 直列)5200mAh×2 |
| ガバナー | ESC側ガバナー(Rotorflight Governor OFF) |
| ヘッドスピード | Normal ~1600rpm / IU1 ~2000rpm / IU2 ~2240rpm |
🚁 JR E8
| クラス | 600 |
|---|---|
| FC | RadioMaster NEXUS-XR |
| ESC | Hobbywing Platinum 130A-HV V4 |
| バッテリー | 8S(4S×2 直列)4200mAh×2 |
| ガバナー | ESC側ガバナー(Rotorflight Governor OFF) |
| ヘッドスピード | Normal ~1800rpm / IU1 ~2120rpm / IU2 ~2420rpm |
🚁 JR Forza450
| クラス | 450 |
|---|---|
| FC | RadioMaster NEXUS-XR |
| ESC | Hobbywing Platinum Pro 60A ESC V4 |
| バッテリー | 3S LiPo |
| ガバナー | ESC側ガバナー(Rotorflight Governor OFF) |
| ヘッドスピード | Normal ~2600rpm / IU1 ~3050rpm / IU2 ~3600rpm |
2026年4月9日フライト / 4月12日解析 — 強風ホバリングテスト
🔵 GOOSKY RS7 Ultra — 解析結果
フライト内容:Log 001(5分20秒)— ノーマルで離陸 → IU1 → IU2 → IU1で長時間ホバリング → ノーマルに戻して着陸 → 再度ノーマルのみで離陸・ホバリング・着陸
📋 PID設定(変更前)
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P | 55 | 55 | 50 |
| Roll I | 88 | 88 | 88 |
| Roll D | 15 | 15 | 15 |
| Roll FF | 80 | 80 | 80 |
| Pitch P | 100 | 105 | 100 |
| Pitch I | 88 | 88 | 88 |
| Pitch D | 45 | 45 | 45 |
| Pitch FF | 80 | 80 | 80 |
📊 フェーズ別ジャイロ安定性
| モード | Roll std (deg/s) | Pitch std (deg/s) | Yaw std (deg/s) |
|---|---|---|---|
| Normal (~1600rpm) | 10.3 | 5.6 | 3.9 |
| IU1 (~2000rpm) | 7.9 | 9.2 | 4.4 |
| IU2 (~2240rpm) | 11.3 | 16.6 | 4.6 |
🔍 PID貢献度分析
Roll(全フライトモード共通の問題)
| モード | P項 | I項 | D項 | FF項 |
|---|---|---|---|---|
| Normal | 3% | 91% | 1% | 5% |
| IU1 | 2% | 92% | 1% | 5% |
⚠️ I項がほぼ単独でロール制御を行っている。P項とD項が極端に低い。
Pitch(バランス良好 ✅)
| モード | P項 | I項 | D項 | FF項 |
|---|---|---|---|---|
| Normal | 4% | 65% | 18% | 13% |
| IU1 | 6% | 45% | 34% | 16% |
📊 その他の診断結果
📊 グラフデータ(RS7 Ultra)
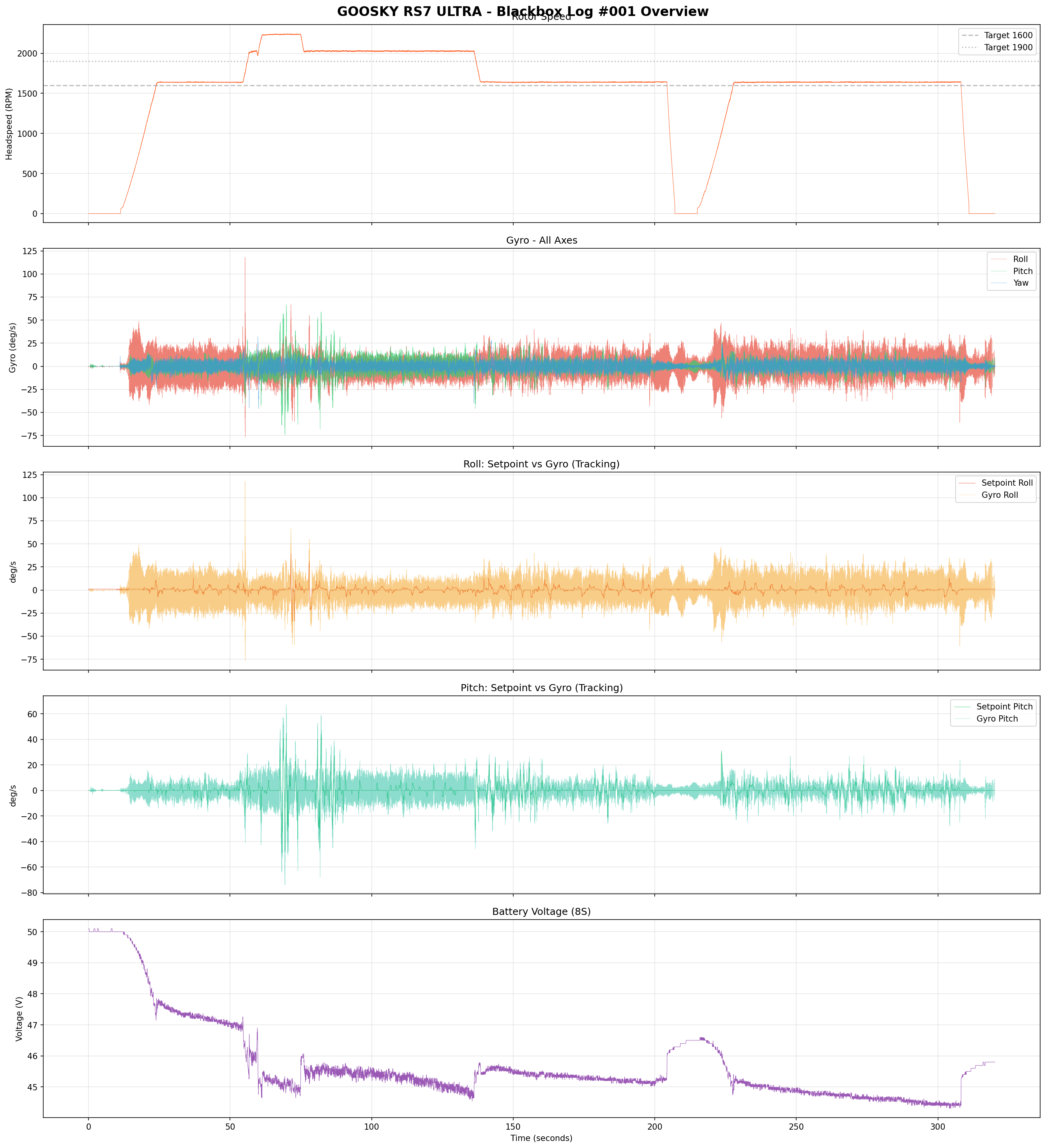
全体概要(ヘッドスピード・ジャイロ・電圧)
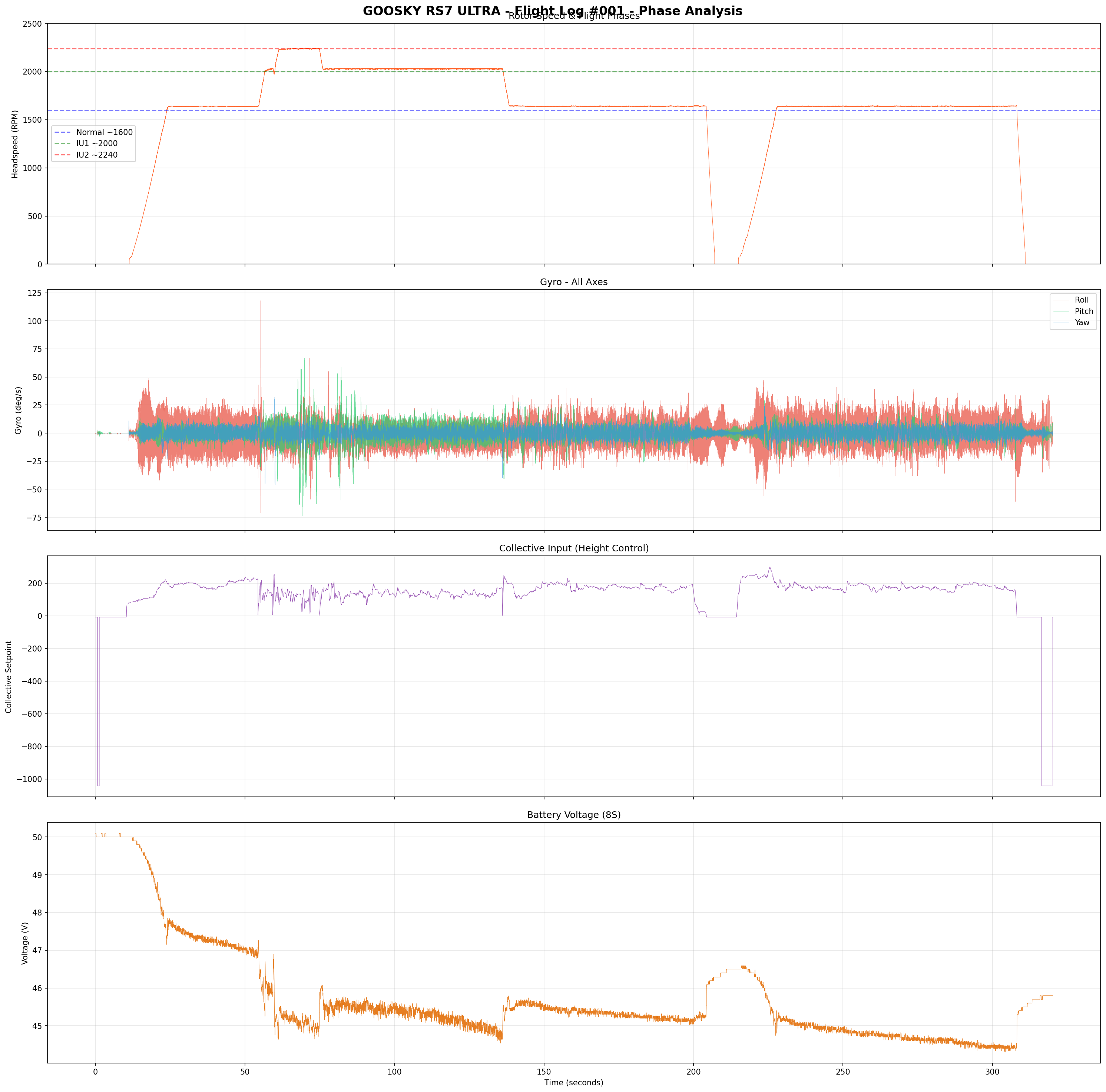
フェーズ別分析
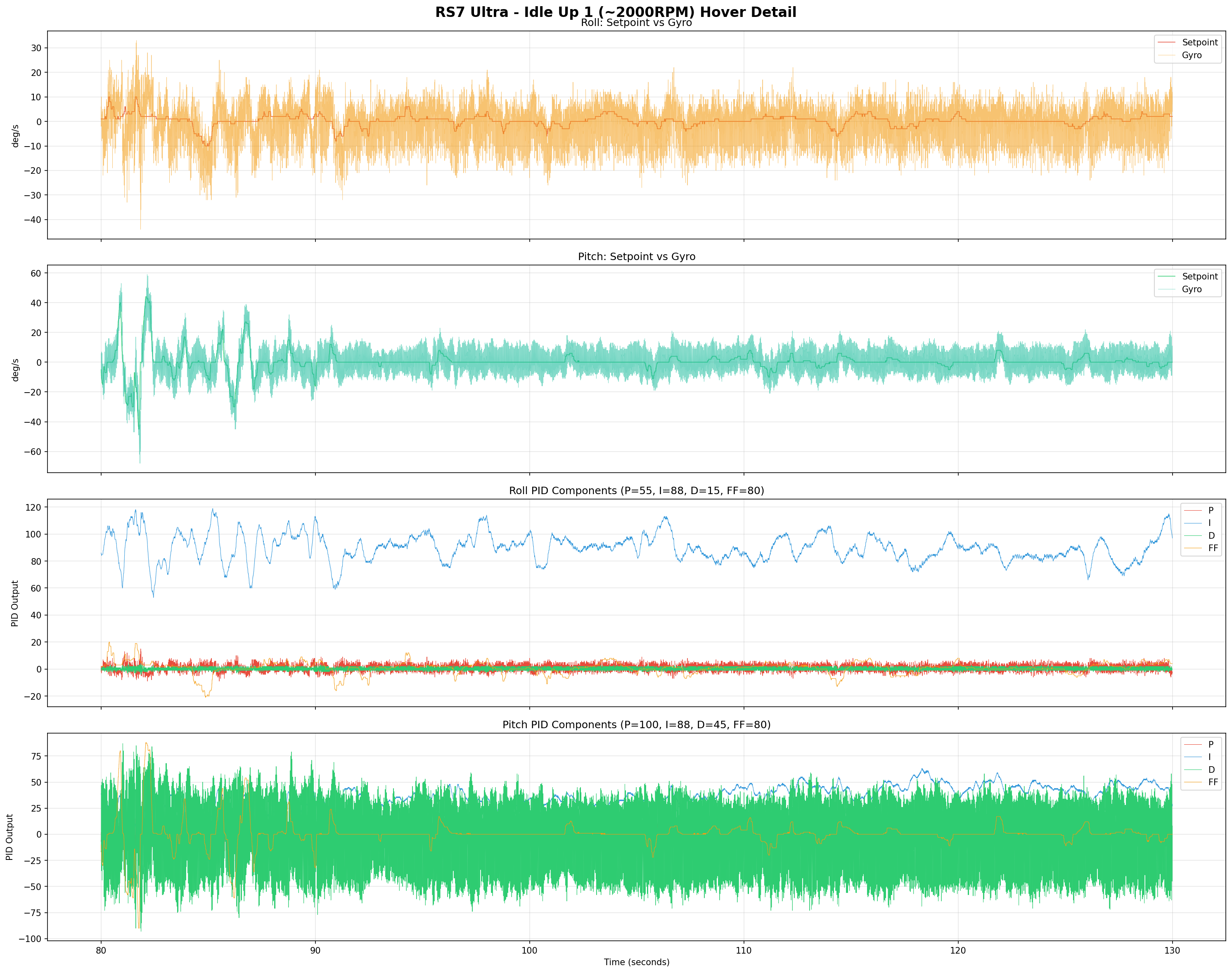
IU1ホバリング詳細(Setpoint vs Gyro / PID各項)
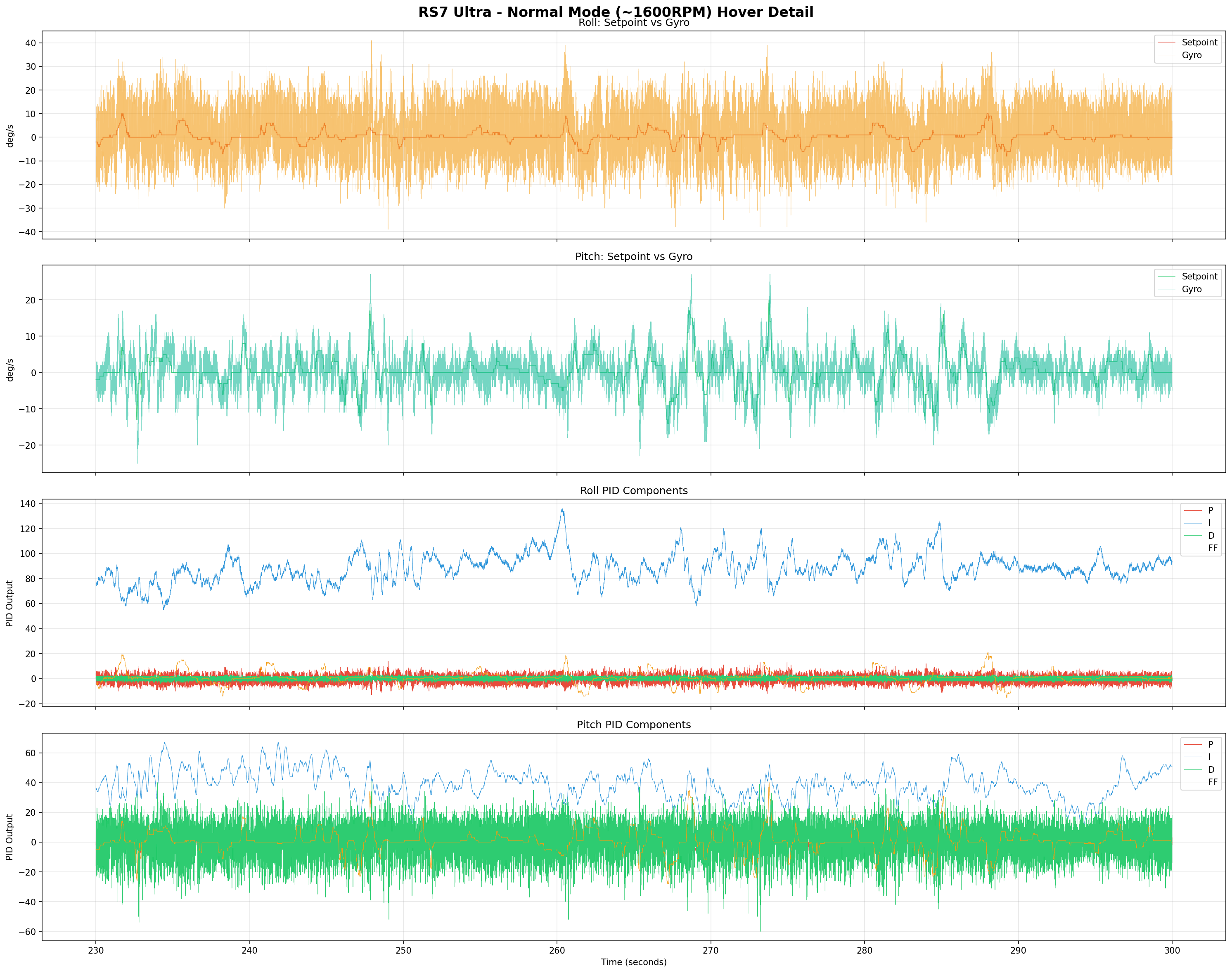
Normalホバリング詳細
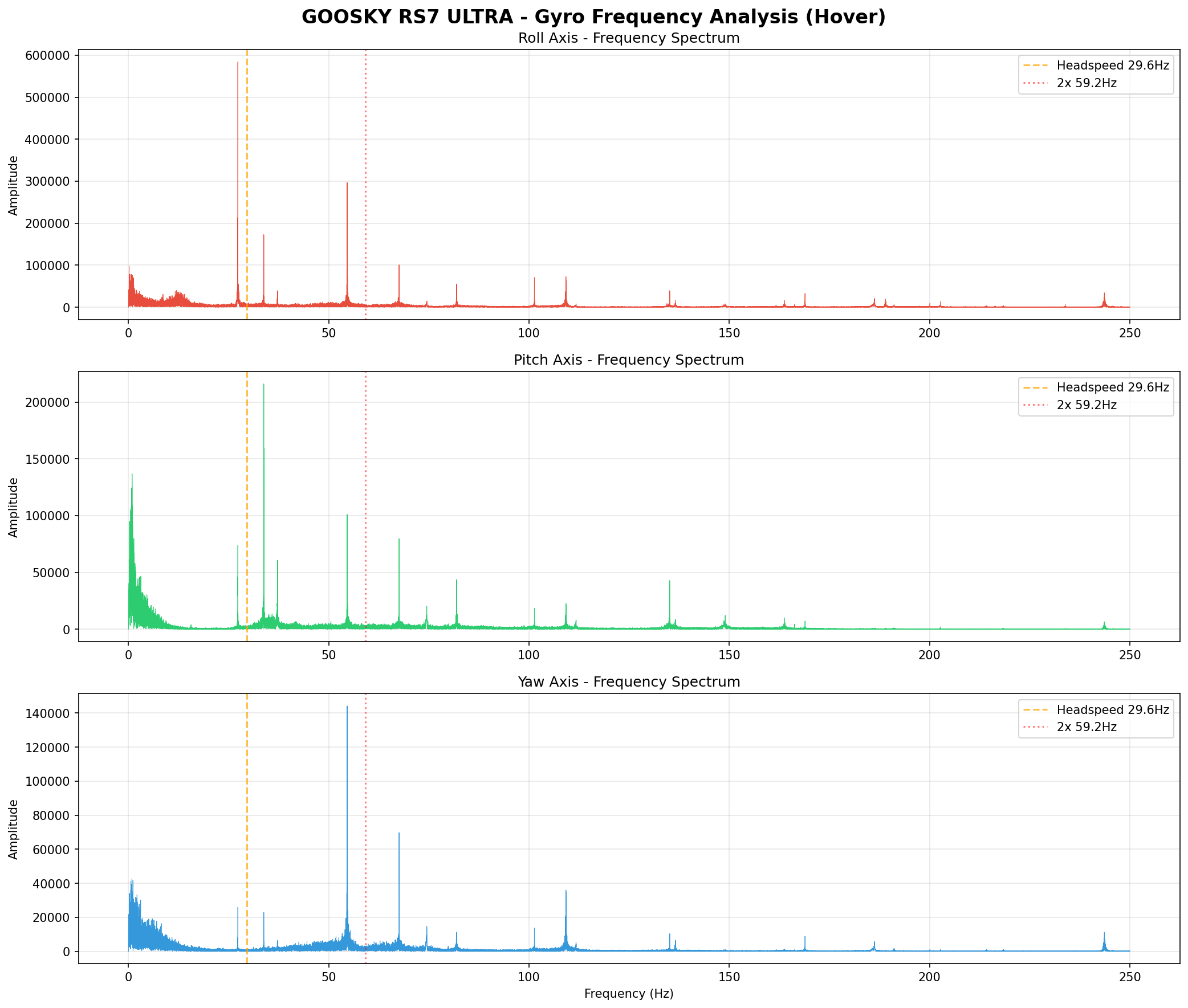
全体周波数解析(FFT)
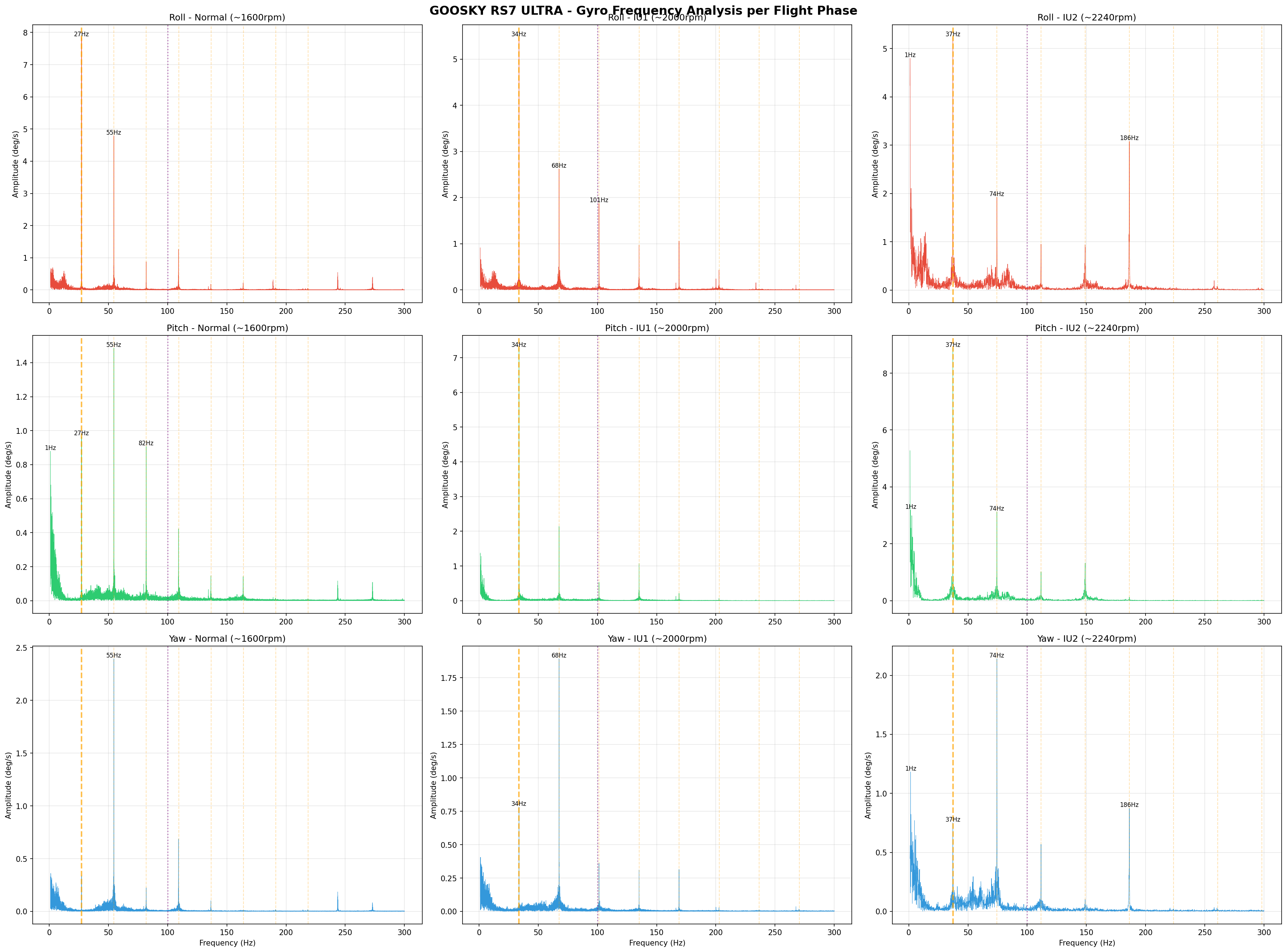
フェーズ別周波数解析
RS7 Ultra 診断結論
Roll PとDが低すぎる → 上げる必要あり
Pitchは合っている → 変更不要
Yawは安定 → 変更不要
🟠 JR E8 — 解析結果
フライト内容:Log 001(7秒、誤操作) Log 002(5分14秒)— ノーマルで離陸 → IU1 → IU2 → IU1 → ノーマルに戻して長時間ホバリング・着陸 — 地面接触5〜6回
📋 PID設定(変更前)
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P | 55 | 55 | 55 |
| Roll I | 100 | 88 | 88 |
| Roll D | 18 | 18 | 18 |
| Roll FF | 100 | 100 | 100 |
| Pitch P | 145 | 140 | 140 |
| Pitch I | 100 | 88 | 88 |
| Pitch D | 43 | 43 | 43 |
| Pitch FF | 100 | 100 | 100 |
🔍 PID貢献度分析
Roll(RS7 Ultraと同じ問題)
| ログ | P項 | I項 | D項 | FF項 |
|---|---|---|---|---|
| Log 002 | 3% | 88% | 1% | 9% |
| Log 003 | 2% | 87% | 1% | 10% |
Pitch(バランス良好 ✅)
| ログ | P項 | I項 | D項 | FF項 |
|---|---|---|---|---|
| Log 002 | 8% | 59% | 11% | 21% |
| Log 003 | 7% | 63% | 9% | 21% |
📊 ジャイロRAWノイズ比較(RS7 Ultra vs E8)
| 軸 | RS7 Ultra RAW std | E8 RAW std | E8/RS7比 |
|---|---|---|---|
| Roll | 11.2 | 48.6 | 4.3倍 |
| Pitch | 8.1 | 17.5 | 2.2倍 |
| Yaw | 4.6 | 16.3 | 3.5倍 |
E8は全体的にRAW振動が大きいが、フィルター(LPF1=100Hz + LPF2=50Hz)で適切にカバーされている。フレーム特性の差であり、メカの問題ではない。
📊 その他の診断結果
📊 グラフデータ(E8)
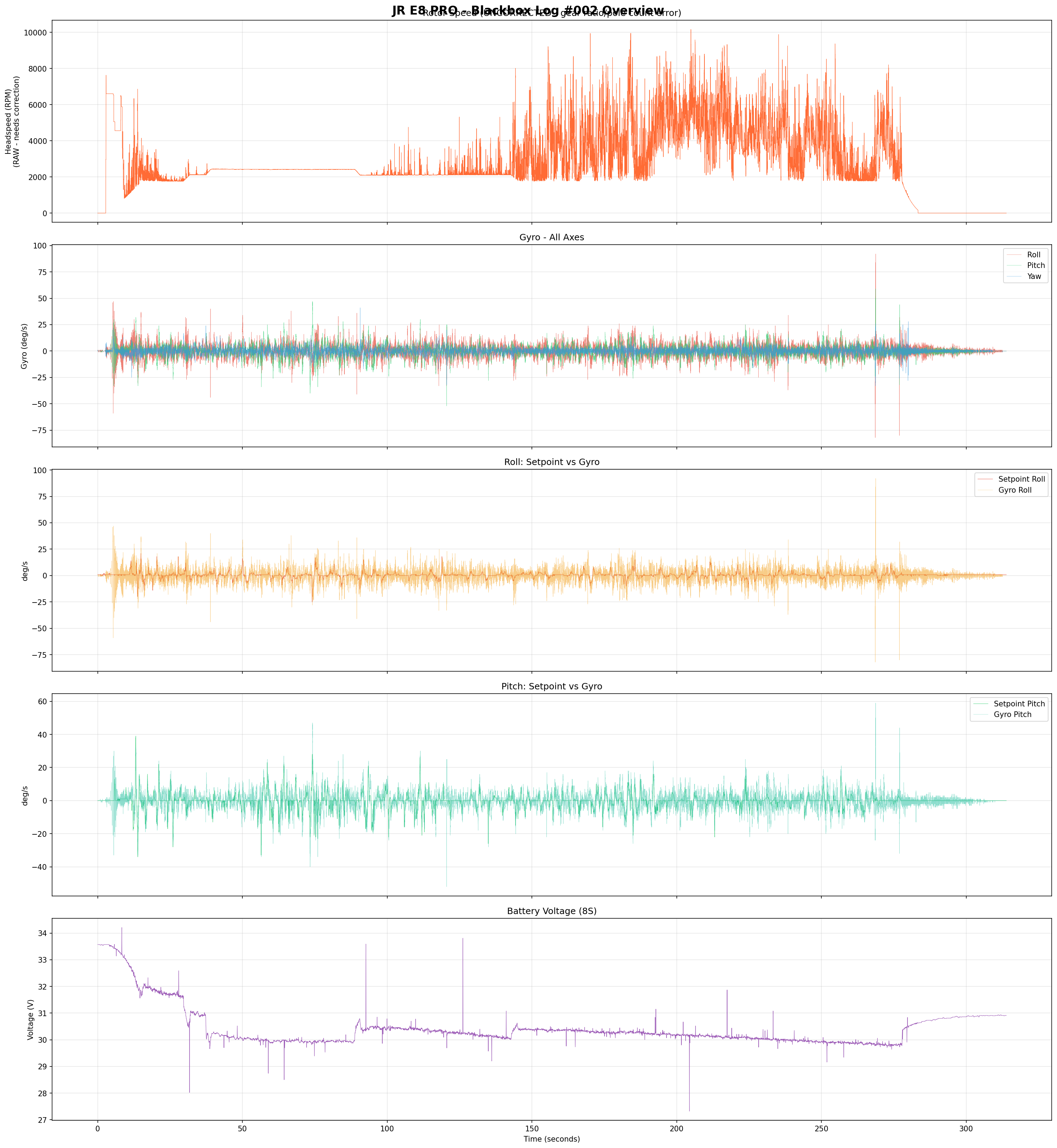
Log 002 全体概要
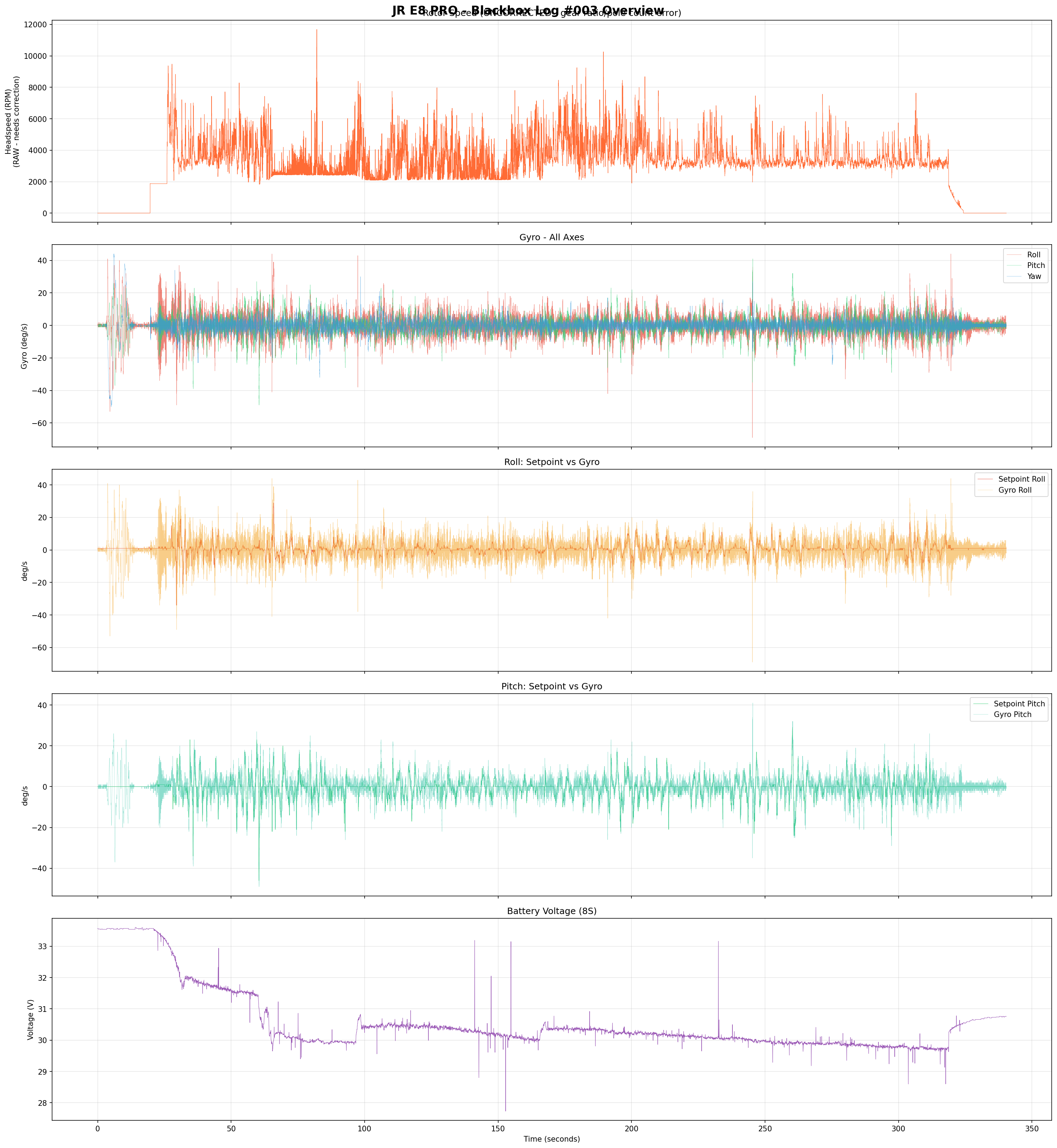
Log 003 全体概要
E8 診断結論
Roll PとDが低すぎる(RS7 Ultraと同じ傾向)
Pitchは合っている → 変更不要
Yawは安定 → 変更不要
第1段階のPID変更(実施済み)
RS7 Ultra
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P | 55 → 70 | 55 → 65 | 50 → 65 |
| Roll D | 15 → 20 | 15 → 20 | 15 → 20 |
E8
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P | 55 → 70 | 55 → 65 | 55 → 65 |
| Roll D | 18 → 23 | 18 → 23 | 18 → 23 |
変更理由
- Roll軸のP項とD項が極端に低く、I項(88〜92%)がほぼ単独で制御していた
- P項を上げることで外乱(風など)に対する即座の応答を改善
- D項を上げることでダンピング(振動抑制)を改善
- IU1・IU2はヘッドスピードが高く応答性が上がるため、Pを少し抑えた
- D項は5ずつの段階的変更が安全の鉄則
2026年4月14日フライト / 解析 — 3機種多機動テスト+Forza450 PID変更前後比較
🟠 JR Forza450 — 解析結果
フライト内容:Flight 1〜3(変更前、各約3.3分)— ノーマル/IU1/IU2全モード使用。前側フリップ、旋回、PID検出用の前後左右振り。Flight 4〜5(変更後)— P+5/FF-5適用後のテスト。
📋 PID設定(変更前:Flight 1〜3)
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P | 37 | 35 | 28 |
| Roll I | 60 | 60 | 60 |
| Roll D | 20 | 20 | 20 |
| Roll FF | 60 | 55 | 42 |
| Pitch P | 37 | 35 | 30 |
| Pitch I | 60 | 60 | 60 |
| Pitch D | 20 | 20 | 20 |
| Pitch FF | 60 | 55 | 42 |
| Yaw P | 100 | 80 | 70 |
| Yaw I | 110 | 100 | 90 |
| Yaw D | 5 | 5 | 5 |
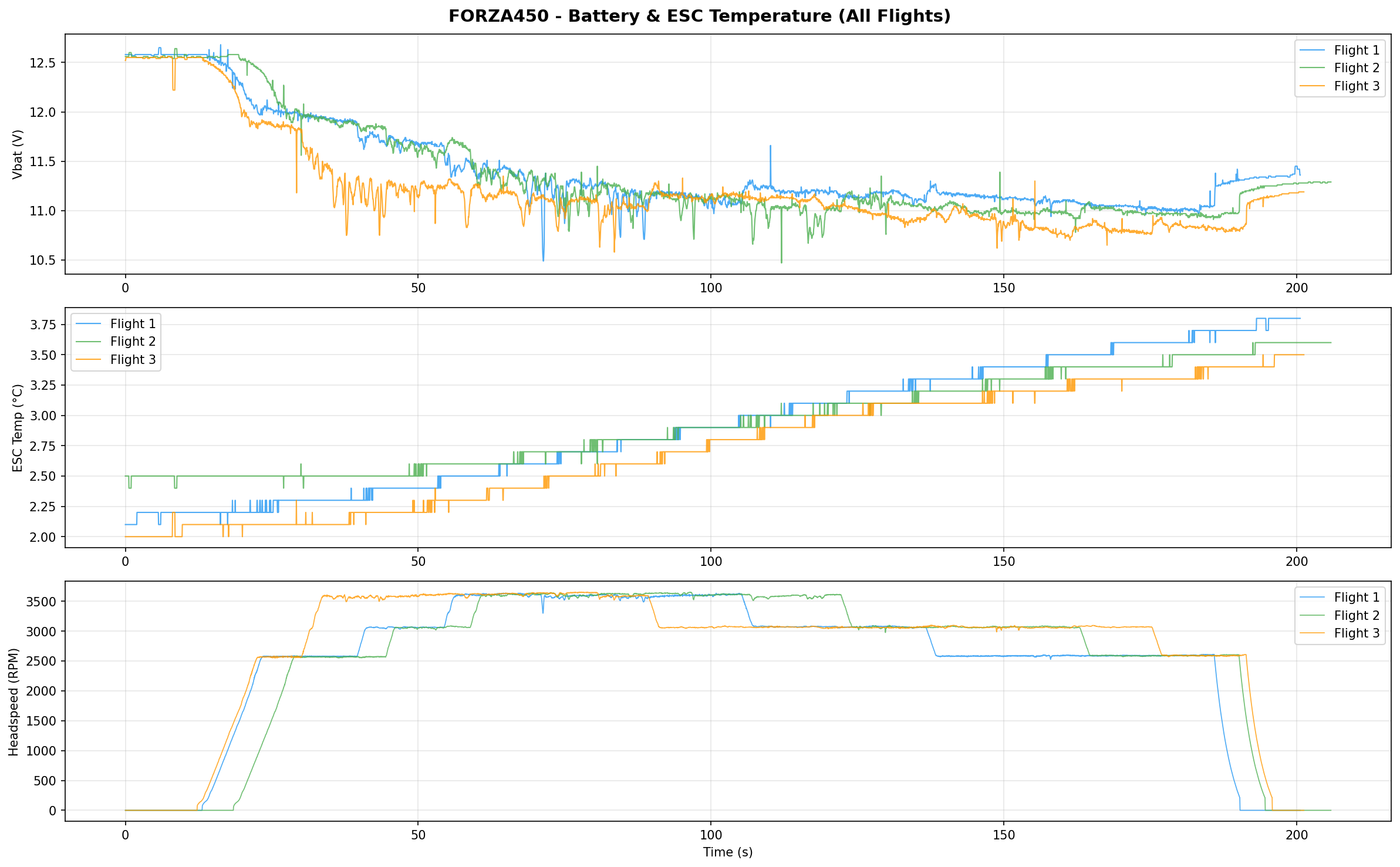
📊 フライトサマリー(変更前)
| 項目 | Flight 1 | Flight 2 | Flight 3 |
|---|---|---|---|
| 飛行時間 | 200.6s | 205.8s | 201.2s |
| ヘッドスピード平均 | 2549 RPM | 2553 RPM | 2757 RPM |
| バッテリー | 12.6V → 11.4V | 12.6V → 11.3V | 12.5V → 11.2V |
| ESC温度 最高 | 38°C | 36°C | 35°C |
| Normal時間 | 68.0s (33.9%) | 45.5s (22.1%) | 26.5s (13.1%) |
| IU1時間 | 46.6s (23.2%) | 55.3s (26.9%) | 88.1s (43.8%) |
| IU2時間 | 50.5s (25.2%) | 63.0s (30.6%) | 57.0s (28.3%) |
📊 モード別トラッキングエラー(RMS)— 変更前 Flight 2基準
| モード | Roll | Pitch | Yaw | 判定 |
|---|---|---|---|---|
| Normal | 6.3 | 6.5 | 4.7 | ○ 良好 |
| IU1 | 10.5 | 9.4 | 14.2 | △ やや大 |
| IU2 | 14.1 | 11.9 | 11.2 | × 要改善 |
🔍 PID出力バランス分析
Roll軸:P項の出力が極端に小さい(RMS=1.5〜2.4)。I項がRMS=22〜25で支配的。FFがスティック入力時のみ動作し、それ以外はI項だけが外乱を処理している状態。
Pitch軸:IU2でFF出力がRMS=60〜67と突出。FF=55がIU2の高回転域で過補償気味。I項もRMS=45〜57と大きく、FF+Iの過剰な出力がハンチングの予兆。
Yaw軸:I項RMS=208〜310と極めて大きい。ただしこれは反トルク補正のオフセット成分を含む。動的な応答自体は安定。
FFの上限問題:FF=55が現状のハンチングなしの上限。これ以上FFを上げると全方向のダンピング的ハンチングが発生する。そのため、FFを下げてPに出力を移す「P+5/FF-5トレード」を実施。
📋 PID変更内容(Flight 4〜5)
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P | 37 → 42 | 35 → 40 | 28 → 33→30 |
| Roll FF | 60 → 55 | 55 → 50 | 42 → 37 |
| Pitch P | 37 → 42 | 35 → 40 | 30 → 35→32 |
| Pitch FF | 60 → 55 | 55 → 50 | 42 → 37 |
| Roll/Pitch I | 60(維持) | 60(維持) | 60 → 57 |
変更理由
- FFを下げた分の出力をP項に移す「トレード方式」で、合計出力を維持しつつハンチングリスクを回避
- IU2(Profile #3)ではP=33がヘッドスピード3600RPMで過敏 → Flight 4で「ものすごいブレ」が発生 → 現場でP=30/32に調整
- IU2のI項も57に微調整(蓄積過多の軽減)
- Error Limit・HSI Gain・HSI Limitのプロファイル間不整合も統一修正
📊 変更前後の比較(Flight 2 vs Flight 5)
| モード | 軸 | Before (F2) | After (F5) | 変化 |
|---|---|---|---|---|
| Normal | Roll | 6.3 | 4.5 | ↓ 改善 |
| Normal | Pitch | 6.5 | 4.6 | ↓ 改善 |
| Normal | Yaw | 4.7 | 3.1 | ↓ 改善 |
| IU1 | Roll | 10.5 | 7.8 | ↓ 改善 |
| IU1 | Pitch | 9.4 | 8.3 | ↓ やや改善 |
| IU1 | Yaw | 14.2 | 8.1 | ↓ -43% 改善 |
| IU2 | Roll | 14.1 | 16.3 | ↑ やや悪化 |
| IU2 | Pitch | 11.9 | 11.4 | → ほぼ同じ |
| IU2 | Yaw | 11.2 | 13.8 | ↑ やや悪化 |
Normal・IU1は明確に改善。P+5/FF-5のトレードが効果を発揮。特にNormalは全軸でRMSが下がり、Roll I項のRMSも22.3→13.3に低下(I項依存度の改善)。
IU2はまだ課題あり。P=33→30に現場調整した後もRMS=16.3とやや悪化。IU2のProfile #3はI=52への追加調整とD=23への段階的変更を予定。
Flight 4の教訓:IU2でP=33は過敏すぎた。ヘッドスピード3600RPMではPの感度が高く、Roll RMS=56.6と大暴れ。「やりすぎるとこうなる」という貴重なデータ。
📊 グラフデータ(変更前 Flight 2)
PID Tracking — Setpoint vs Gyro 全体俯瞰
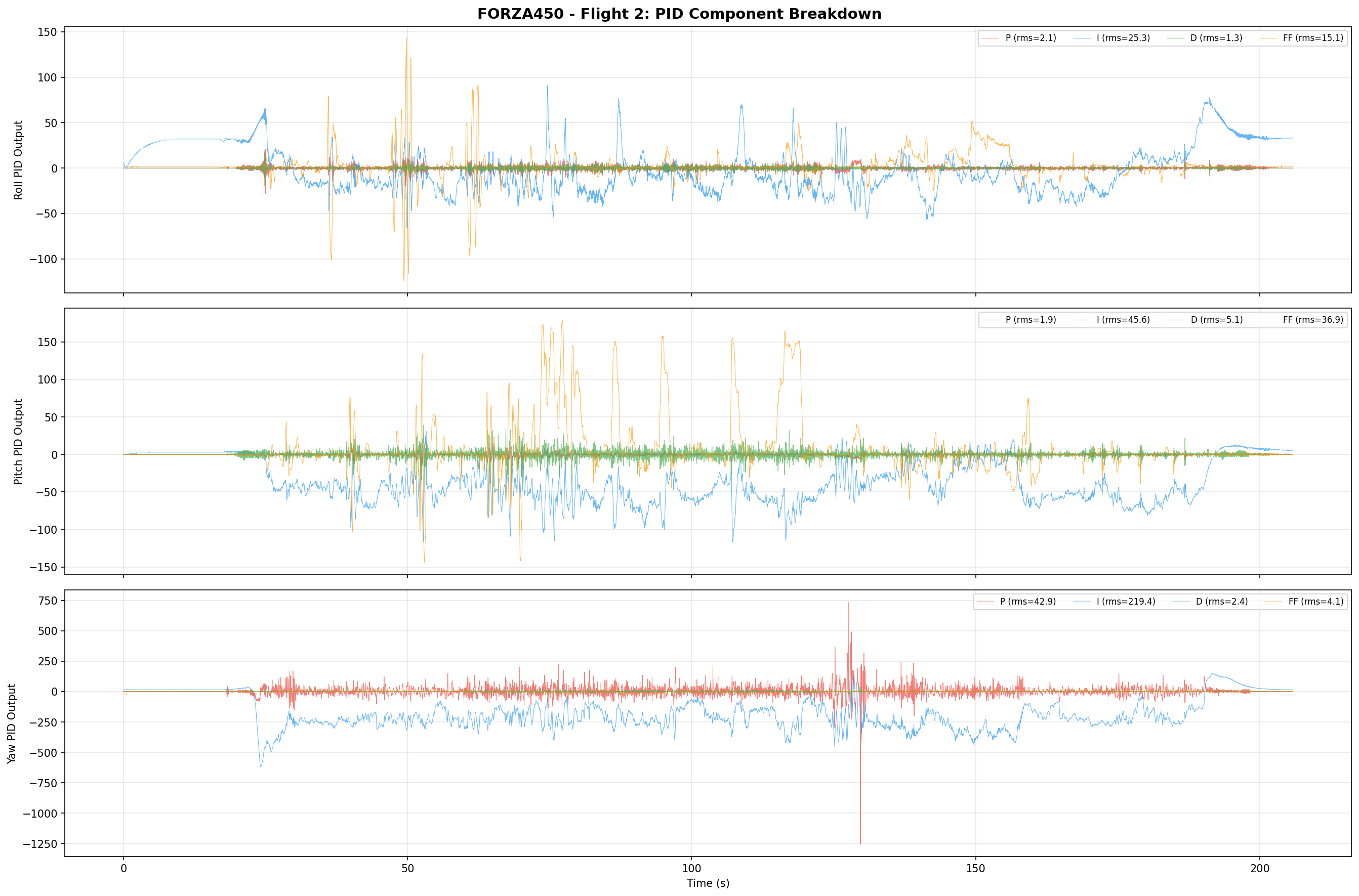
PID Component Breakdown — I項依存が顕著
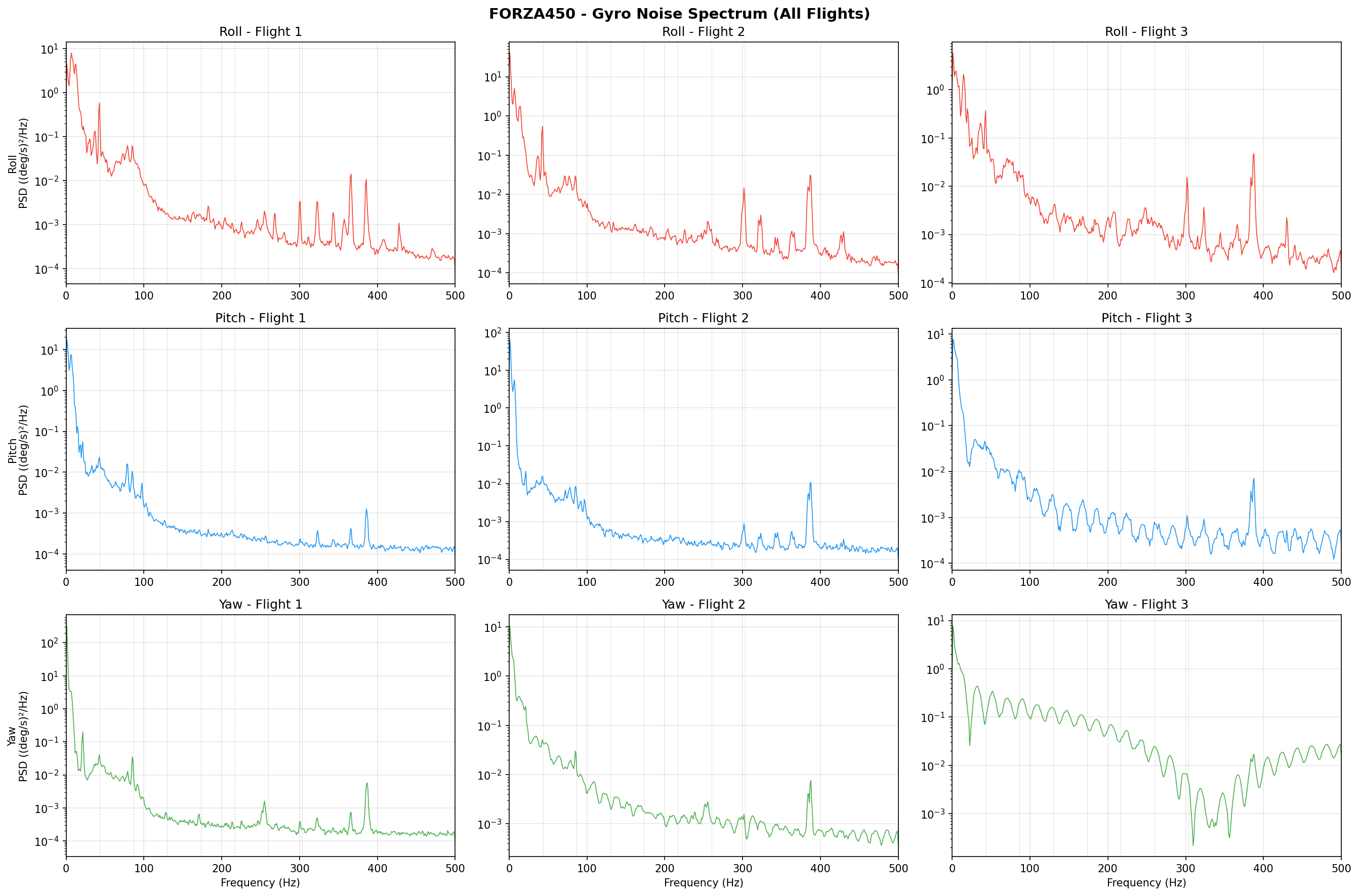
周波数解析 — 全3フライト×3軸
バッテリー・ESC温度・ヘッドスピード推移
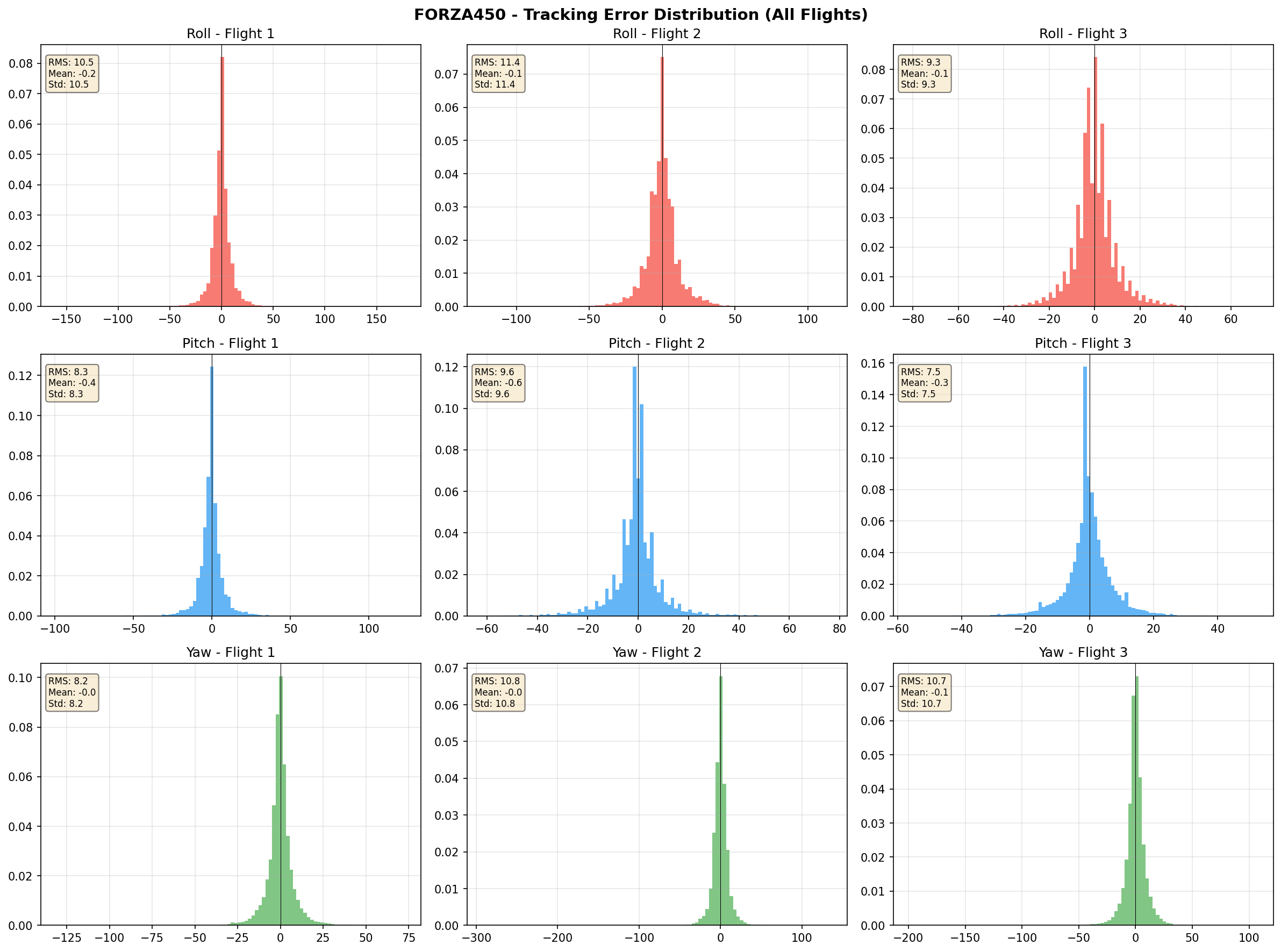
トラッキングエラー分布(3フライト×3軸)
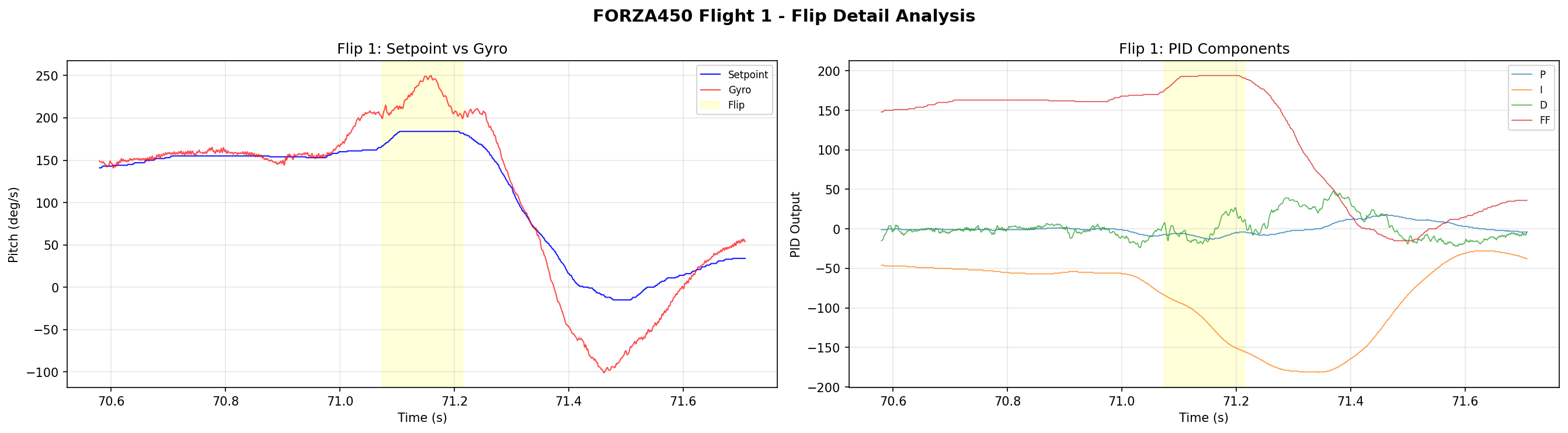
フリップ時のPID詳細(FF=55の応答)
📊 変更前後の比較グラフ
Before vs After — Setpoint vs Gyro 比較
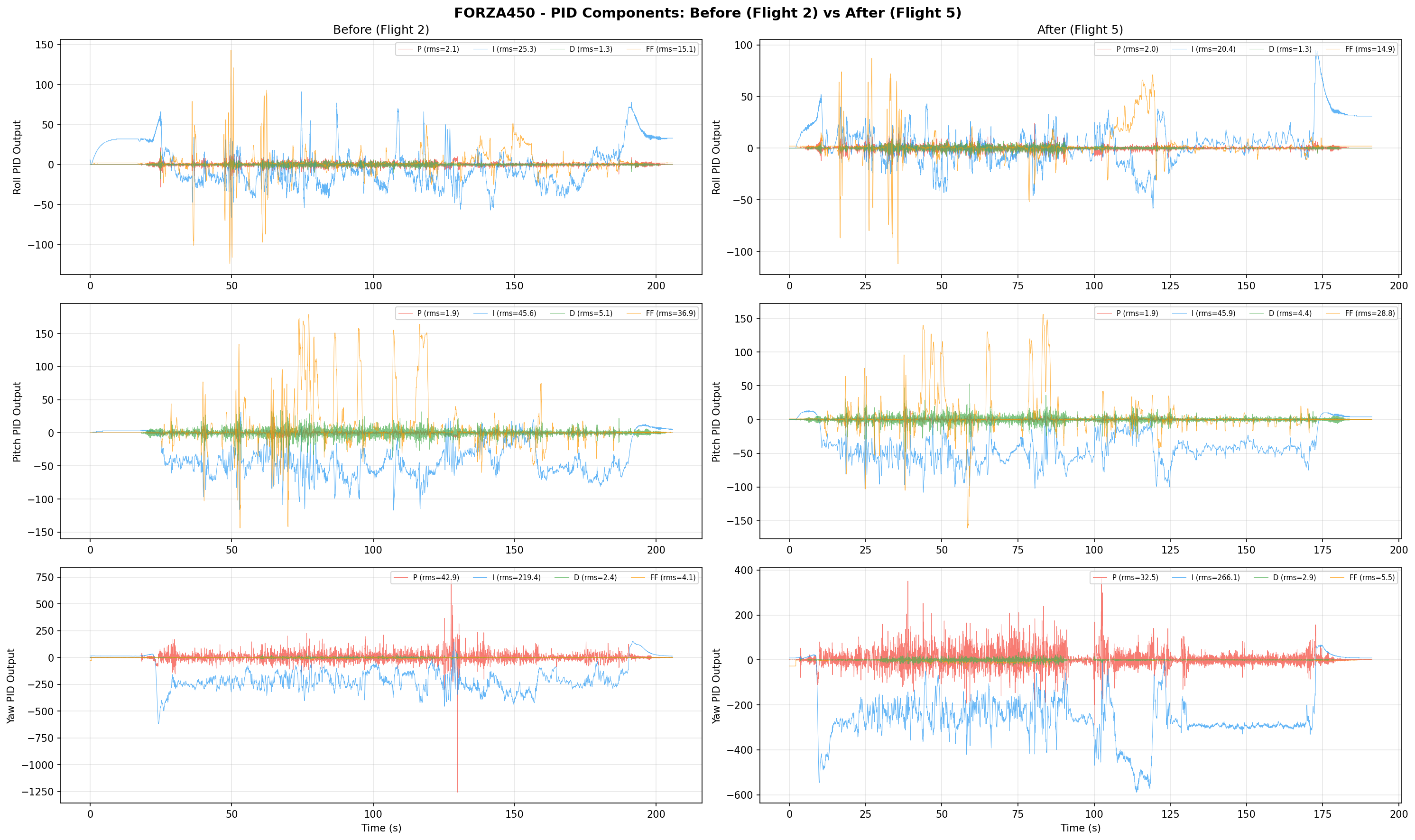
Before vs After — PID出力バランス比較
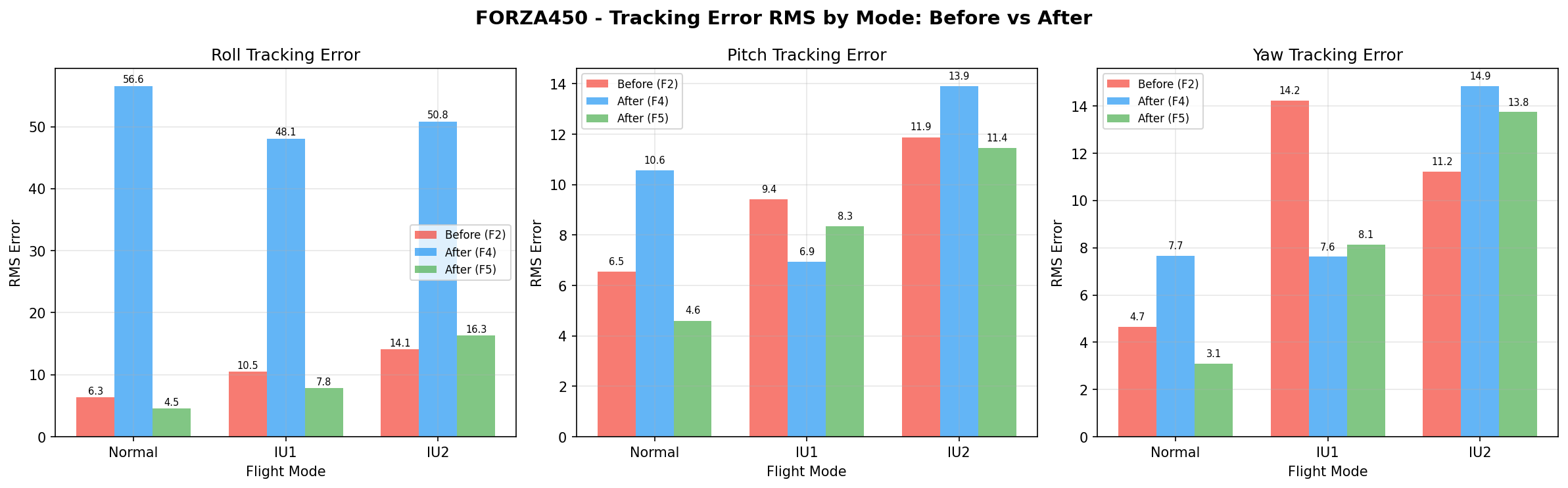
モード別RMSエラー比較(棒グラフ)
Flight 4 — IU2でP=33が過敏(大暴れ)
Flight 5 — P=30/32に調整後(安定化)
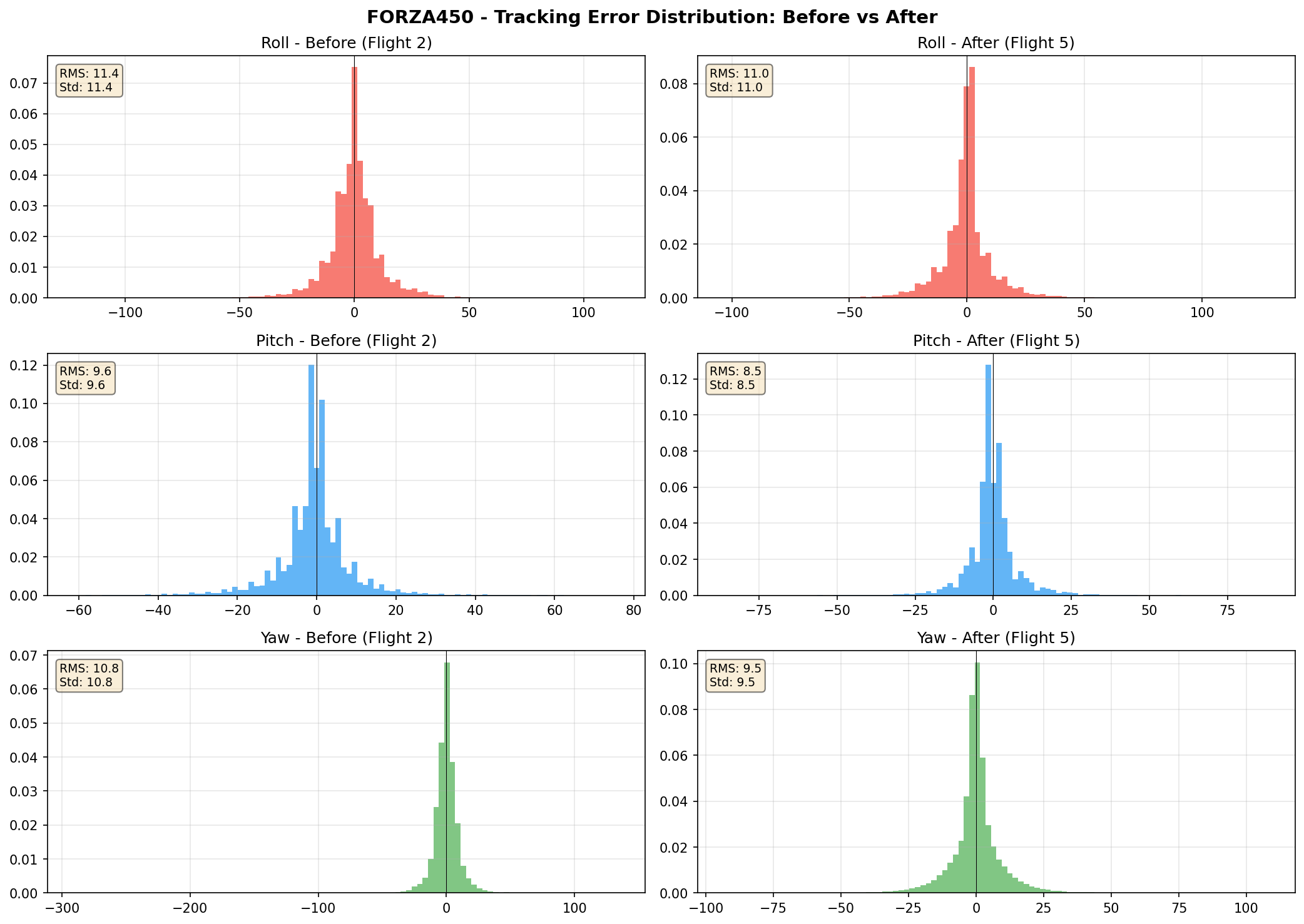
エラー分布比較(Before vs After)
🔵 GOOSKY RS7 Ultra — 解析結果(Flight 003)
フライト内容:Log 003(5分20秒)— ノーマル/IU1/IU2全モード使用。ホバリング、旋回、ストールターン、ピルエットフリップ、フリップなど多彩な機動。地面接触なし。
📋 PID設定(①で変更後の値)
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P | 70 | 65 | 65 |
| Roll I | 100 | 88 | 88 |
| Roll D | 23 | 20 | 20 |
| Roll FF | 100 | 80 | 80 |
| Pitch P | 145 | 105 | 100 |
| Pitch I | 100 | 88 | 88 |
| Pitch D | 43 | 45 | 45 |
| Pitch FF | 100 | 80 | 80 |
📊 モード別トラッキングエラー(RMS)
| モード | Roll | Pitch | Yaw |
|---|---|---|---|
| Normal (~1637rpm) | 9.4 | 4.0 | 5.1 |
| IU1 (~2025rpm) | 14.5 | 13.0 | 15.6 |
| IU2 (~2237rpm) | 16.2 | 12.8 | 16.8 |
🔍 I項オフセット分析
Yaw I項のオフセット(平均-550、RMSの98%):メインローター反トルクを打ち消すための定常補正。シングルローターヘリの物理特性であり正常。
Roll I項のオフセット(平均+40〜50、RMSの63〜77%):テールローターの横推力による機体の傾きを補正。これもシングルローターの物理特性であり正常。
体感「バシッと止まる」:Roll P/D変更の効果が出ている。PIDバランスが改善し、全体の動的応答が向上。現状で変更不要。
バッテリー:12S 50.10V → 45.20V。瞬間的な電圧降下あり(最低39.54V=3.30V/cell、3D(アクロバット)時の大電流ドロップ、飛行に影響なし)。
📊 グラフデータ(RS7 Ultra)
PID Tracking — Setpoint vs Gyro
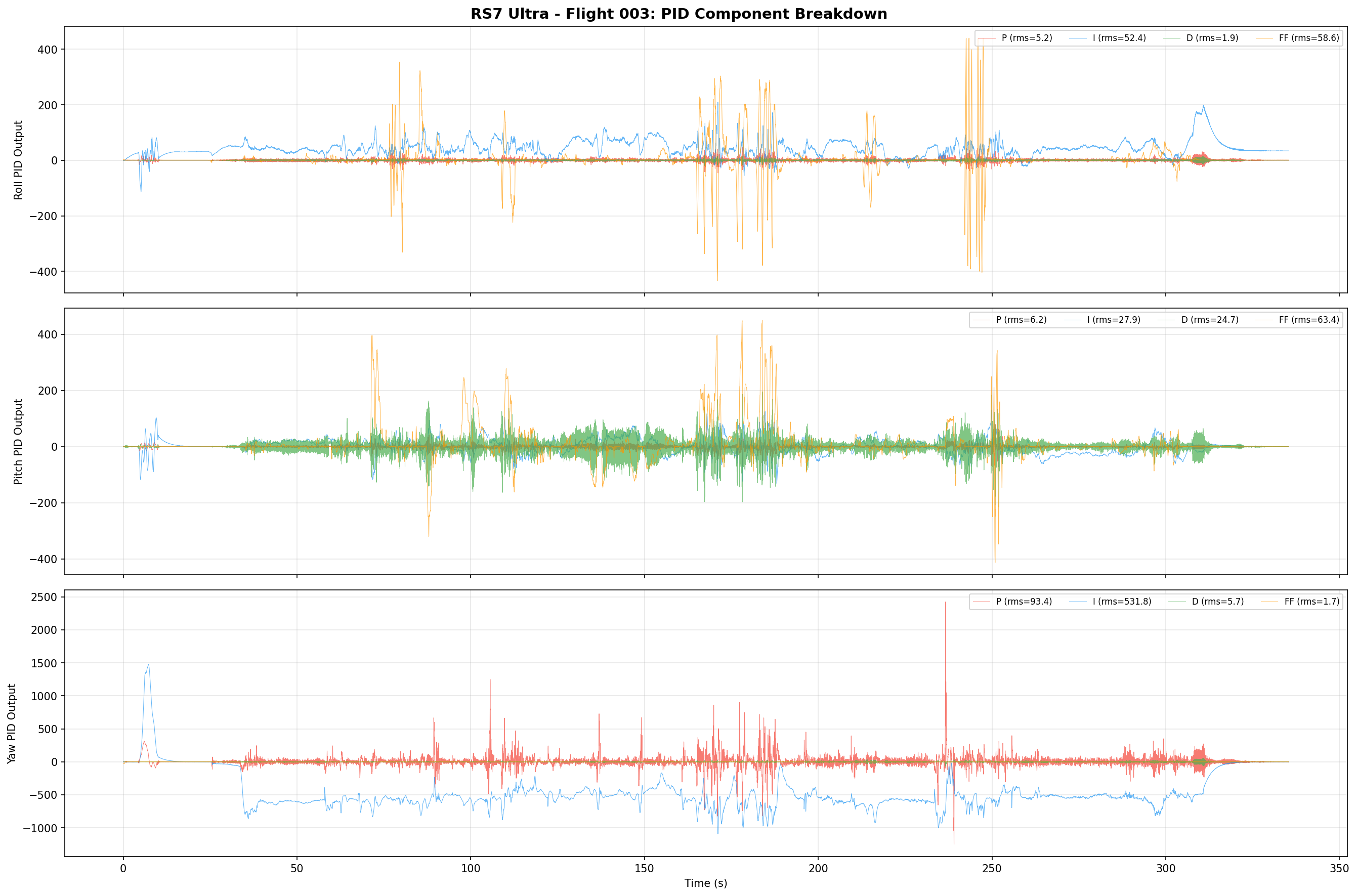
PID Component Breakdown
🟢 JR E8 — 解析結果(Flight 004)
フライト内容:Log 004(5分20秒)— IU1/IU2中心。ホバリング、旋回、ストールターン、ピルエットフリップ、フリップ、軽いメトロノーム。地面接触なし。
📋 PID設定(①で変更後の値)
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P | 70 | 65 | 65 |
| Roll I | 100 | 88 | 88 |
| Roll D | 23 | 23 | 23 |
| Roll FF | 100 | 100 | 100 |
| Pitch P | 145 | 140 | 140 |
| Pitch I | 100 | 88 | 88 |
| Pitch D | 43 | 43 | 43 |
| Pitch FF | 100 | 100 | 100 |
📊 モード別トラッキングエラー(RMS)
| モード | Roll | Pitch | Yaw |
|---|---|---|---|
| IU1 | 13.1 | 13.3 | 26.8 |
| IU2 | 10.0 | 9.5 | 25.2 |
🔍 分析結果
Roll P改善の効果あり:P項のRMSが前回の2〜3から4.3〜5.6に増加。P項の仕事量が約2倍に。ただしI項(RMS=46〜47)がまだ支配的。
Yaw RMS=25〜27が大きい:E8のYaw I項はオフセットではなく動的変動(std=149)が主因。I=140→120に下げることで動的なオーバーシュート改善が見込める。
FF=100でハンチングなし:600クラスのローター慣性が大きいため、FF=100でも過補償にならない。Forza450(450クラス)ではFF=55が上限だったのと対照的。
バッテリー:8S 33.57V → 29.81V。瞬間的な電圧降下あり(最低25.84V=3.23V/cell、3D(アクロバット)時の大電流ドロップ、飛行に影響なし)。
📊 グラフデータ(E8)
PID Tracking — Setpoint vs Gyro
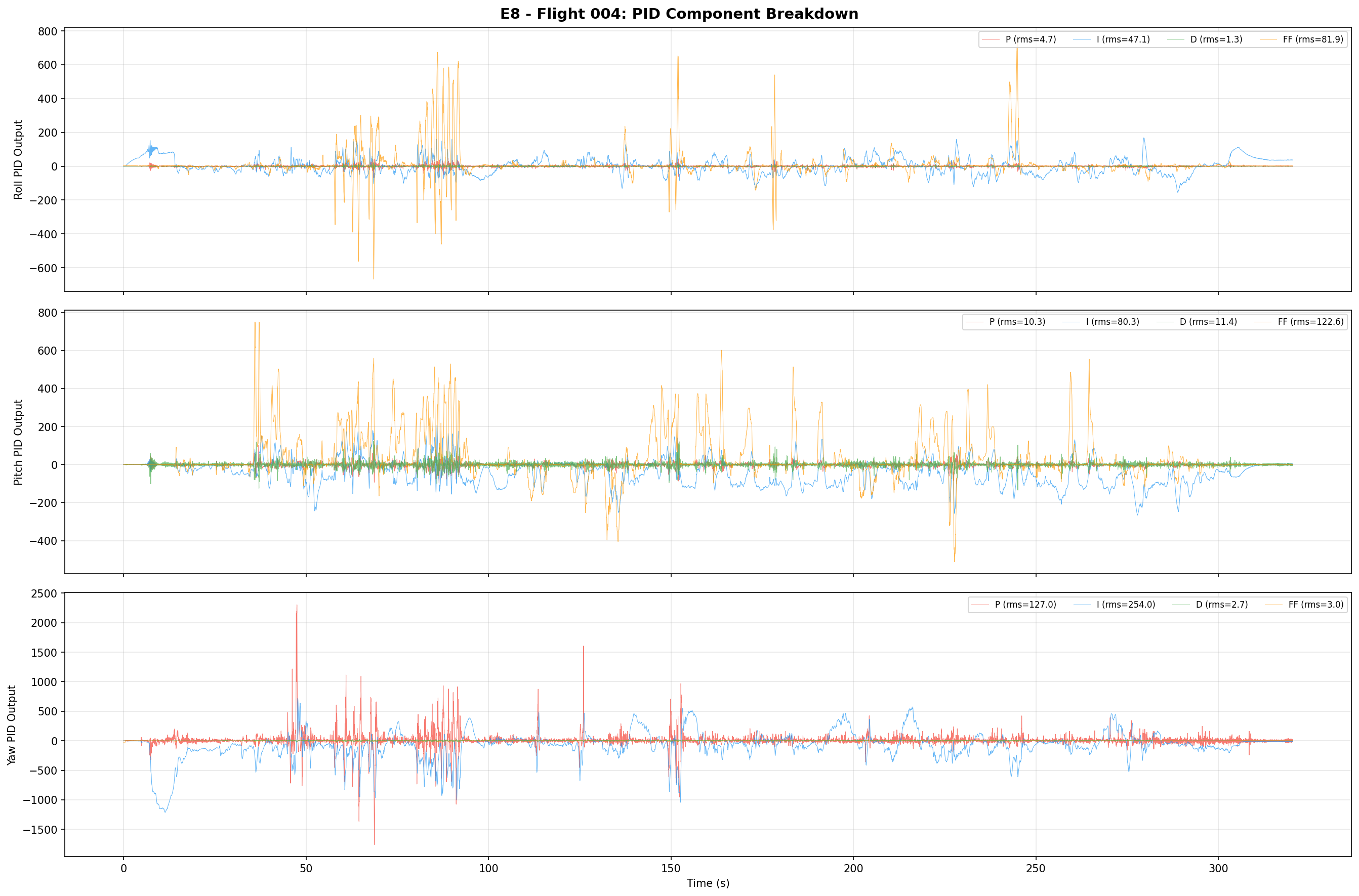
PID Component Breakdown
③ 2026年4月15日フライト / 解析 — I項・D項の限界探索
🟠 JR Forza450 — 解析結果(③ D項の限界発見)
フライト内容:Flight 1(I=52, D=20)とFlight 2(I=52, D=23)の比較テスト。D=23でのノイズ増幅を検証。
📋 PID設定(③テスト)
| Flight 1 (I=52, D=20) | Flight 2 (I=52, D=23) | |
|---|---|---|
| Roll P/I/D/FF | 30 / 52 / 20 / 37 | 30 / 52 / 23 / 37 |
| Pitch P/I/D/FF | 32 / 52 / 20 / 37 | 32 / 52 / 23 / 37 |
| Yaw P/I/D | 70 / 90 / 5 | 70 / 90 / 5 |
🔍 分析結果
📊 ホバリング D-term RMS比較(D=20 vs D=23)
| D=20 (F1) | D=23 (F2) | 倍率 | |
|---|---|---|---|
| Normal Pitch | 1.7 | 5.8 | ×3.5 |
| Normal Yaw | 0.7 | 1.7 | ×2.4 |
| IU2 Pitch | 3.8 | 8.6 | ×2.3 |
| IU2 Roll | 0.4 | 1.0 | ×2.2 |
| IU1 Roll | 0.6 | 0.7 | ×1.1 |
📊 グラフデータ(③ Forza450)
Tracking比較 — D=20 vs D=23
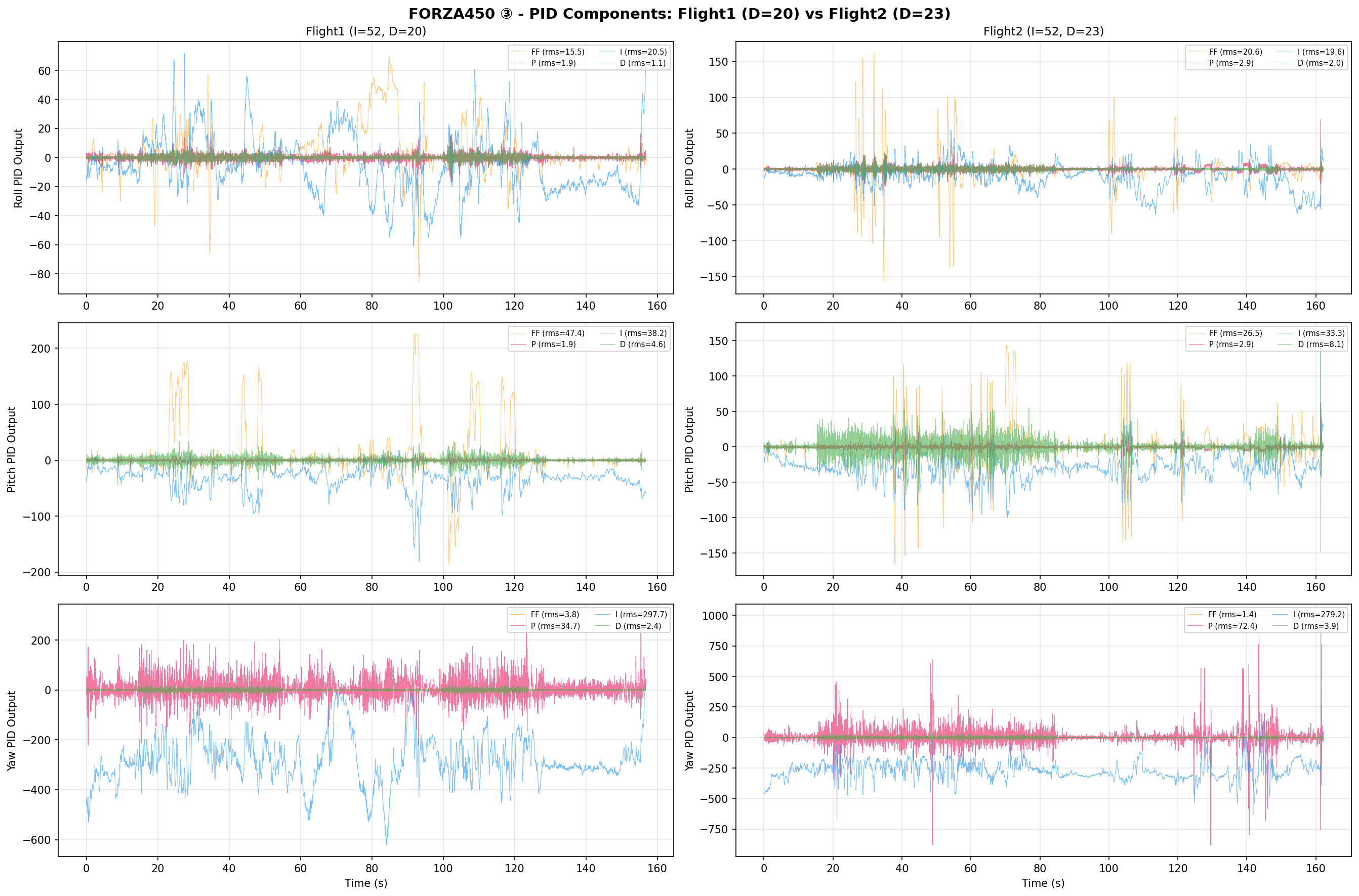
PID Components — D-term増大が明確
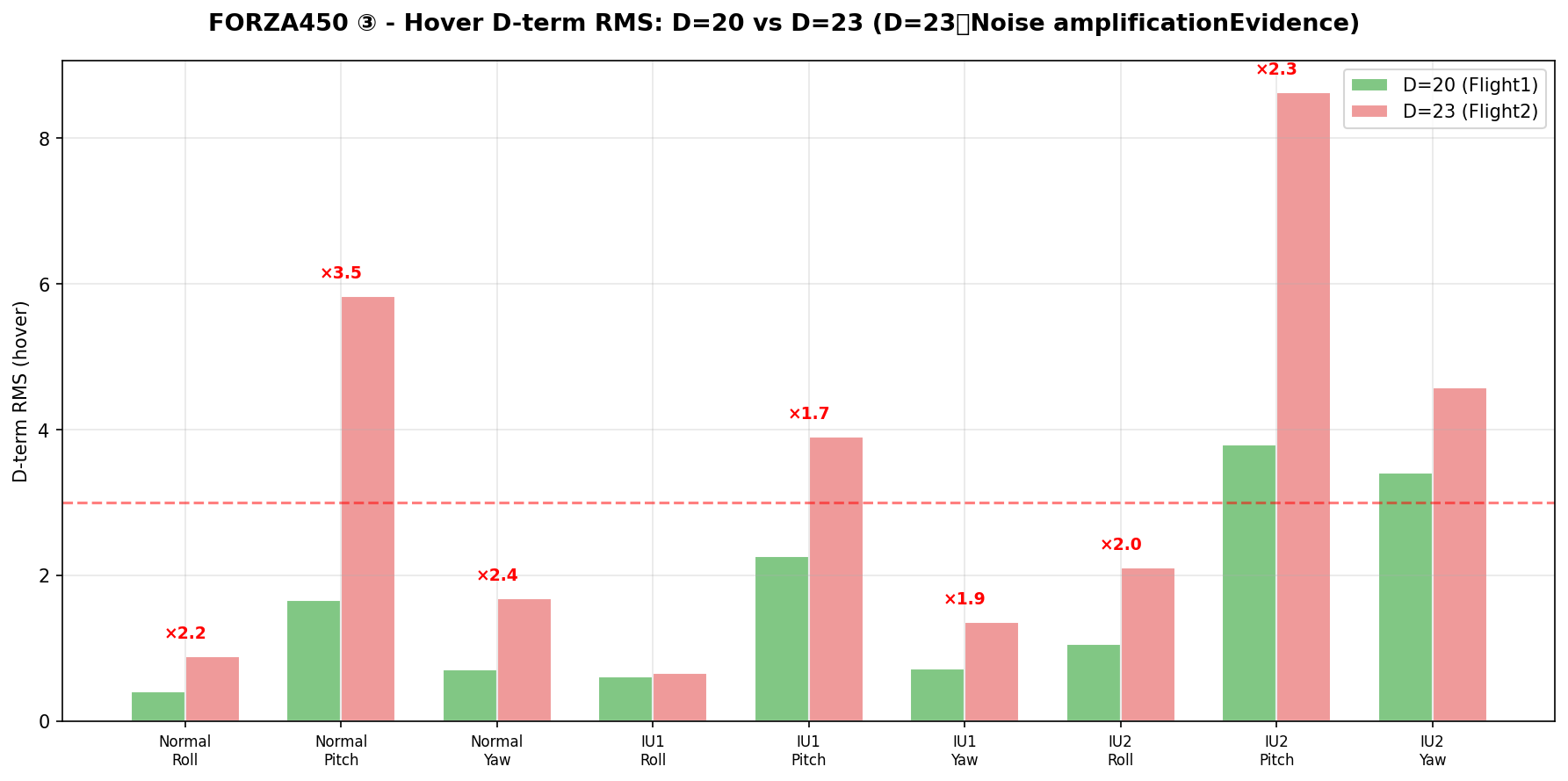
D-term RMS棒グラフ — ×3.5のノイズ増幅の証拠
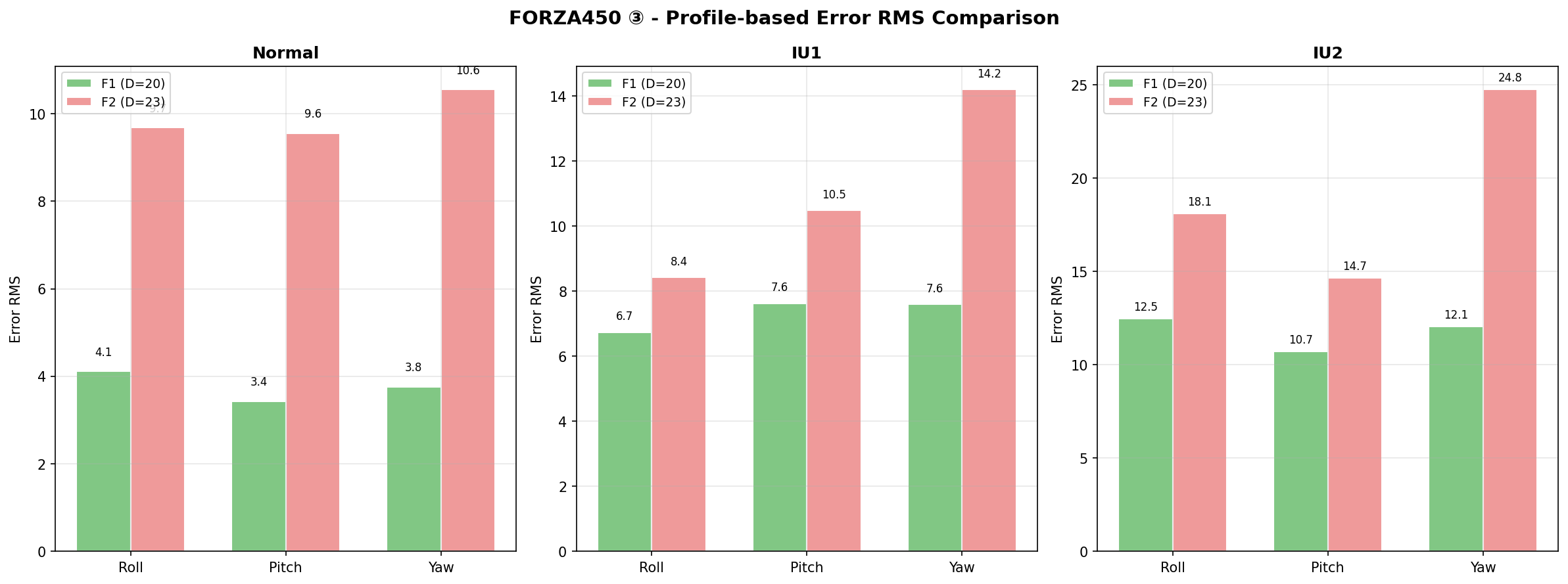
プロファイル別Error RMS — D=20が全面的に優位
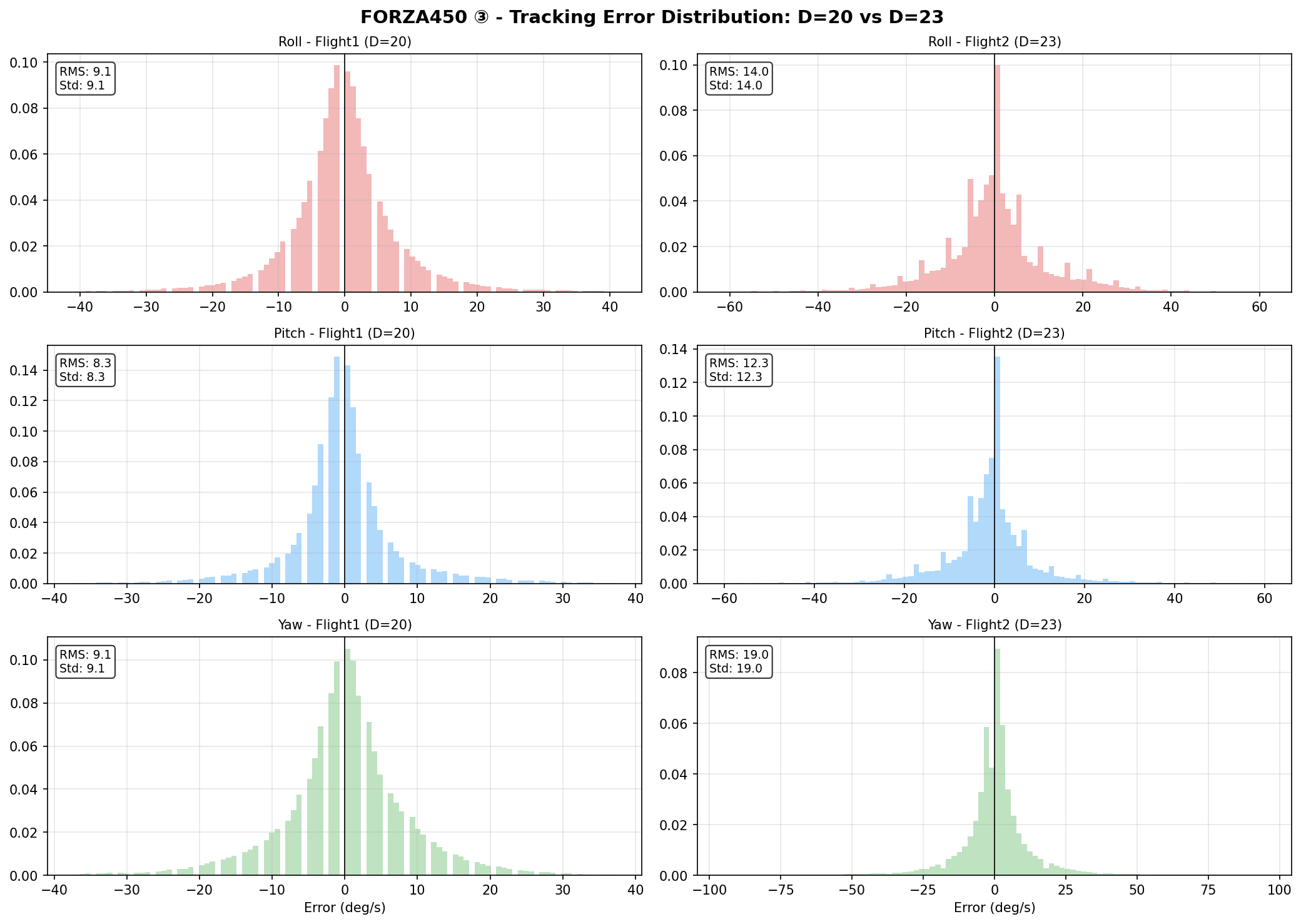
エラー分布 — D=20 vs D=23
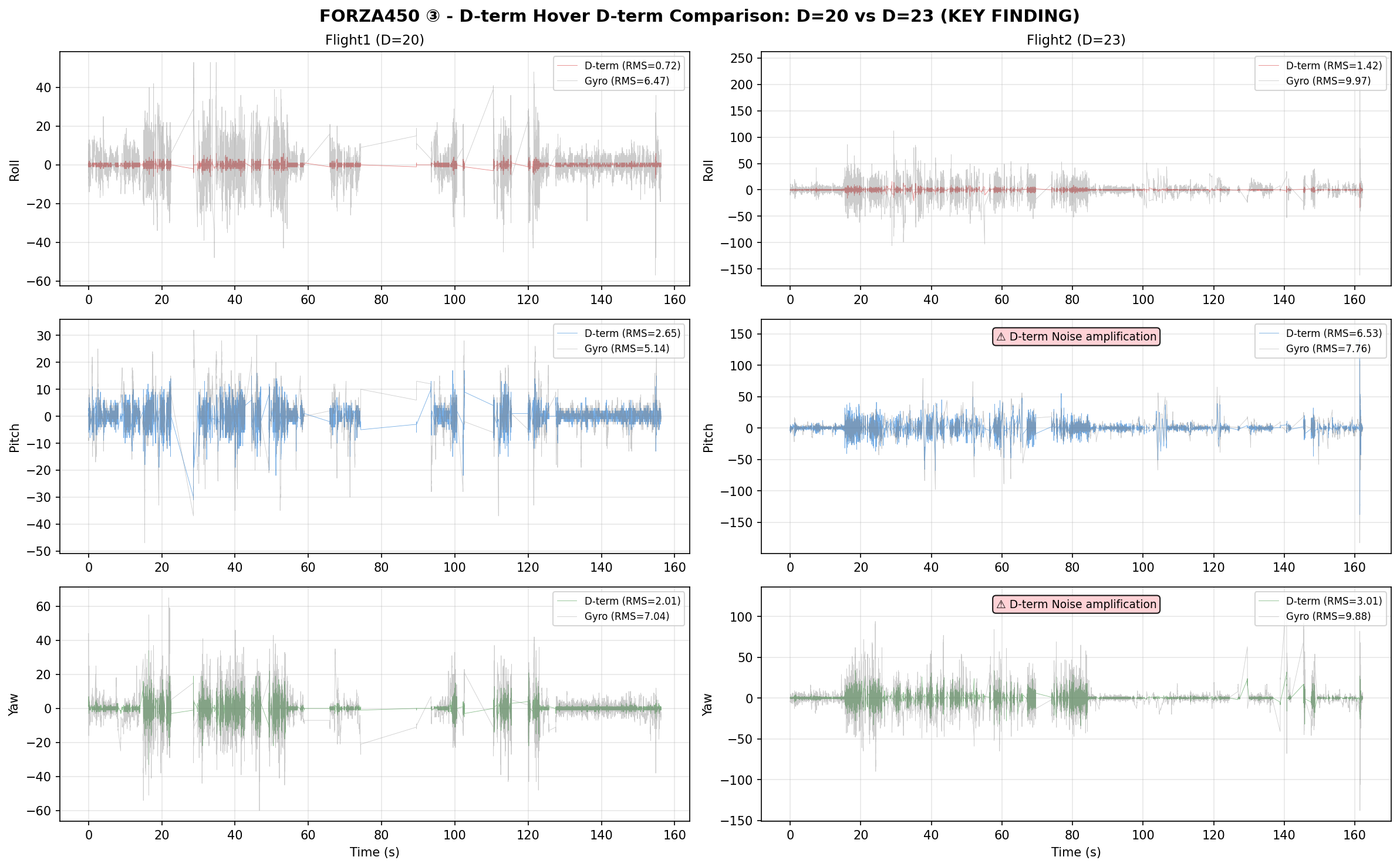
D-term ホバリング時系列 — ノイズ増幅の可視化
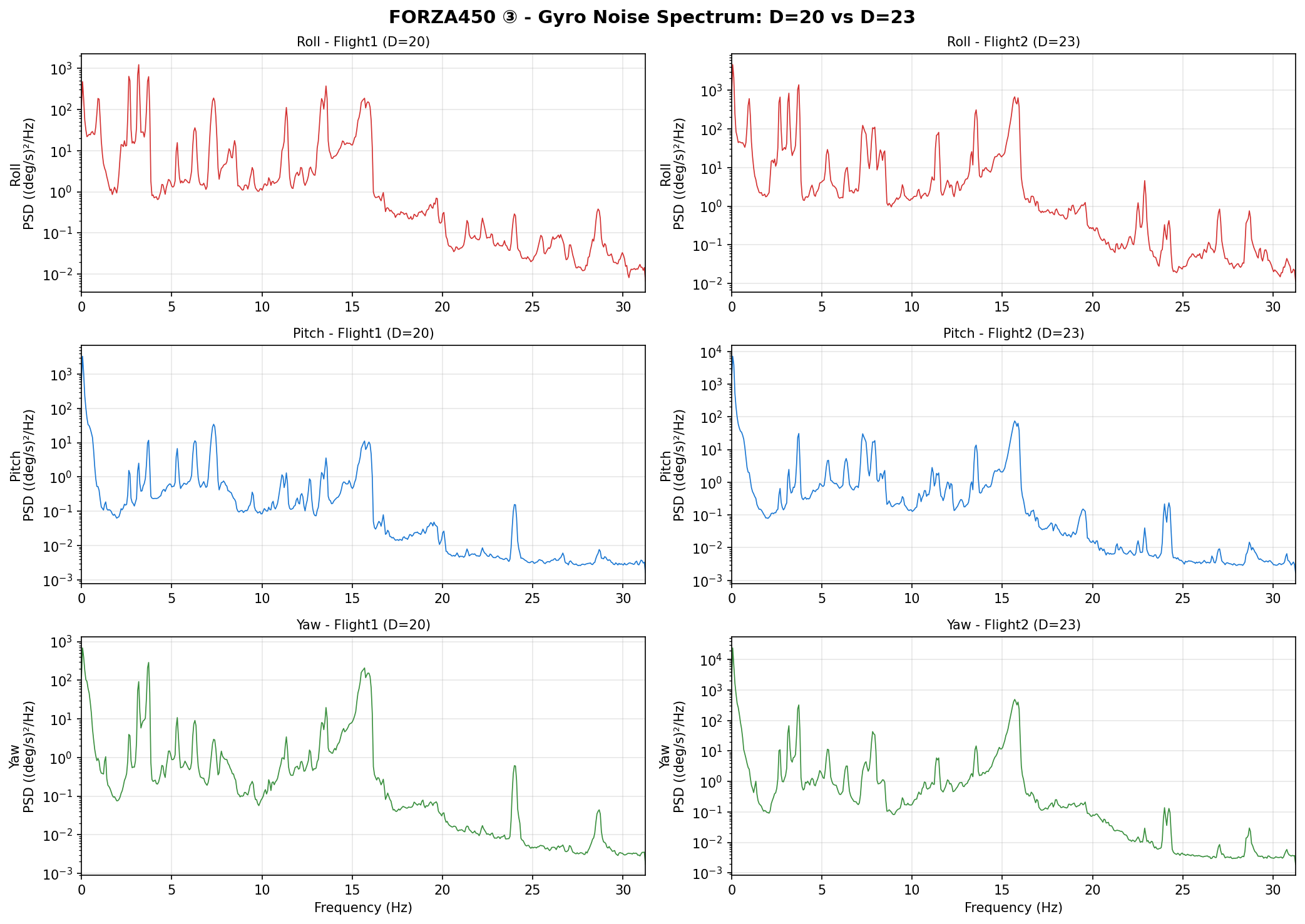
周波数分析 — D=20 vs D=23
🟢 JR E8 — 解析結果(③ Yaw I=120確認)
フライト内容:Yaw I=140→120への変更効果確認。IU1/IU2中心のホバリング・旋回・ピルエット。
🔍 分析結果
④ 2026年4月16日フライト / 解析 — 風耐性テスト+Roll I最適化
🟠 JR Forza450 — 解析結果(④ 風耐性とI項限界)
フライト内容:Flight 1(Roll I=48)→ブルブル発生。Flight 2(P=30,I=52,FF=37に戻す)→風で震え持続。Flight 3(P=28,I=50,FF=34に調整)→安定。Tail Gain変更も実施。
🔍 分析結果
📋 現在の設定(④確定値)
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P | 42 | 40 | 28 |
| Roll I | 60 | 60 | 50 |
| Roll D | 20 | 20 | 20 |
| Roll FF | 55 | 50 | 34 |
| Pitch P | 42 | 40 | 32 |
| Pitch I | 60 | 60 | 52 |
| Pitch D | 20 | 20 | 20 |
| Pitch FF | 55 | 50 | 37 |
| Yaw P | 100 | 80 | 70 |
| Yaw I | 110 | 100 | 90 |
| Yaw D | 5 | 5 | 5 |
📊 全項目チェック(Flight 3)
| 項目 | 結果 | 判定 |
|---|---|---|
| Pitch軸 | Error 6.5〜6.6(全プロファイル) | ✅ 正常 |
| Yaw軸 | Normal=5.5, IU2=13.0 | ✅ 正常 |
| バッテリー | 10.6V〜11.7V(3S) | ✅ 正常 |
| ESC温度 | 22〜28°C | ✅ 正常 |
| D-term | D=20でノイズ増幅なし | ✅ 正常 |
| ヘッドスピード | Normal=2590, IU1=3058, IU2=3597 | ✅ 安定 |
| サーボ出力 | リミット張り付きなし | ✅ 正常 |
🟢 JR E8 — 解析結果(④ Roll I=80成功+Yawオーバーシュート発見)
フライト内容:Roll I=88→80の効果確認。IU1/IU2ホバリング・ピルエット。IU1でピルエット後のYawオーバーシュートを発見。
🔍 分析結果
📊 Roll I=88 vs I=80 比較(ホバリング Error RMS)
| モード | 軸 | I=88 (前回) | I=80 (今回) | 変化 |
|---|---|---|---|---|
| Normal | Roll | 4.1 | 3.6 | ↓ 改善 |
| Normal | Pitch | 4.2 | 4.2 | → 同じ |
| Normal | Yaw | 3.8 | 2.5 | ↓ 改善 |
| IU1 | Roll | 6.9 | 5.7 | ↓ 改善 |
| IU1 | Pitch | 5.6 | 4.6 | ↓ 改善 |
| IU2 | Roll | 5.4 | 4.9 | ↓ 改善 |
| IU2 | Pitch | 4.8 | 4.7 | → 同じ |
📊 グラフデータ(④ E8)
E8 Tracking — Roll I=80, Yaw I=120
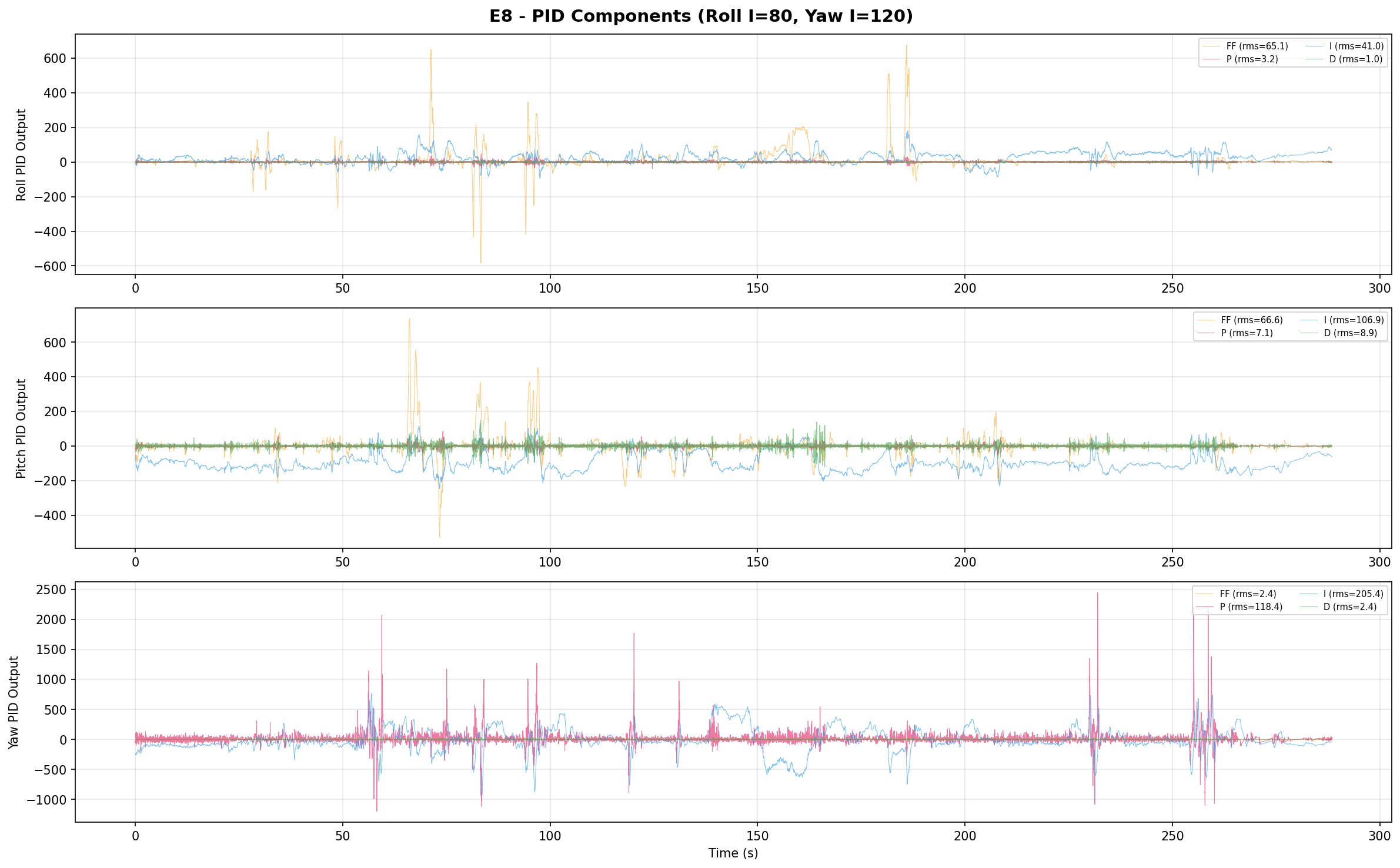
E8 PID Components — I項バランス改善
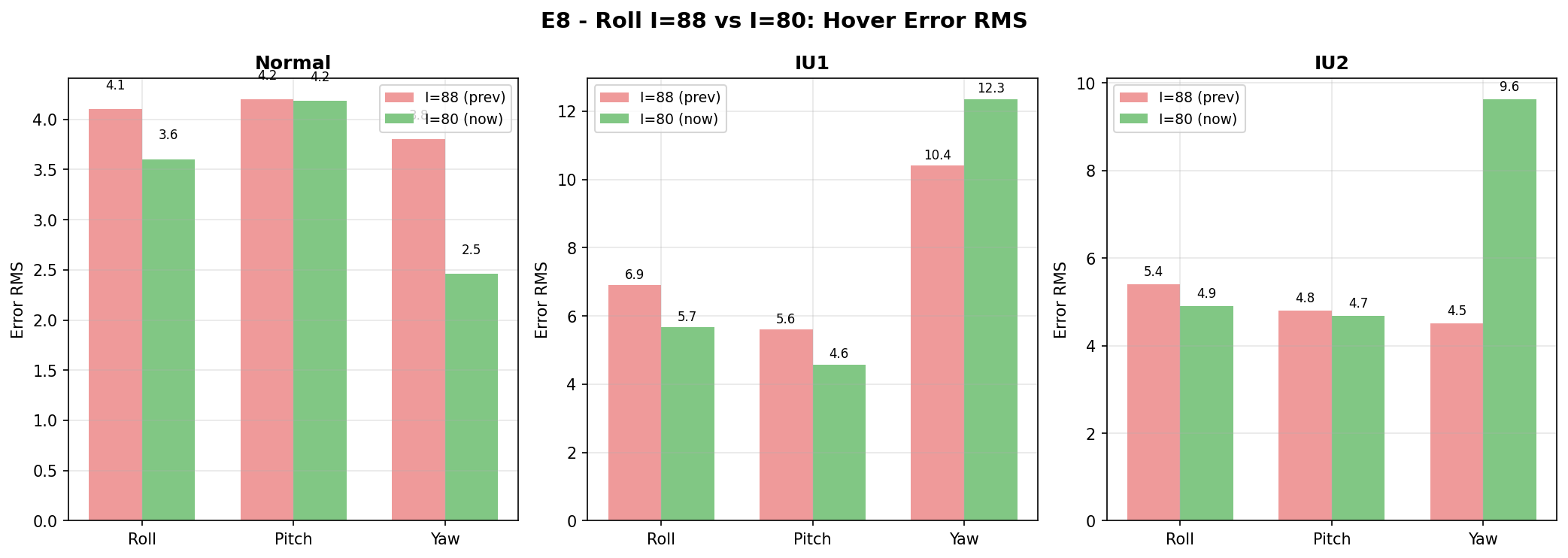
Roll I=88 vs I=80 — 全プロファイルで改善
IU1 Yawオーバーシュート — I項蓄積の可視化
📋 現在の設定(④確定値)
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P/I/D/FF | 70 / 100 / 23 / 100 | 65 / 80 / 23 / 100 | 65 / 80 / 23 / 100 |
| Pitch P/I/D/FF | 145 / 100 / 43 / 100 | 140 / 88 / 43 / 100 | 140 / 88 / 43 / 100 |
| Yaw P/I/D/Boost | 150 / 200 / 0 / 20 | 90 / 120 / 5 / 10 | 90 / 120 / 5 / 5 |
| I-term Relax Yaw | 10 | 8(変更予定) | 10 |
⑤ 2026年4月27日フライト / 解析 — Yaw再構築+FF=80 による3軸対策
フライト所感ベースでの追い込みに切り替え、7フライトの試行錯誤の末、Yaw PID 全体の再構築+Yaw Stop Gain 増加+現場知見に基づく FF=100→80 の3軸対策で良好な状態に到達した。
🟢 JR E8 — 解析結果(⑤ Yaw再構築+FF=80)
Profile#2 (IU1):Yaw P 90→97, Yaw I 120→135, Yaw D 5→12, Roll/Pitch FF 100→80, I-term Relax Yaw 10→8, Yaw Bandwidth 200→250
Profile#3 (IU2):Roll/Pitch FF 100→80, I-term Relax Yaw 6→10(元に戻した)
Profile#2/#3共通:CW Yaw Stop Gain →130, CCW Yaw Stop Gain →78
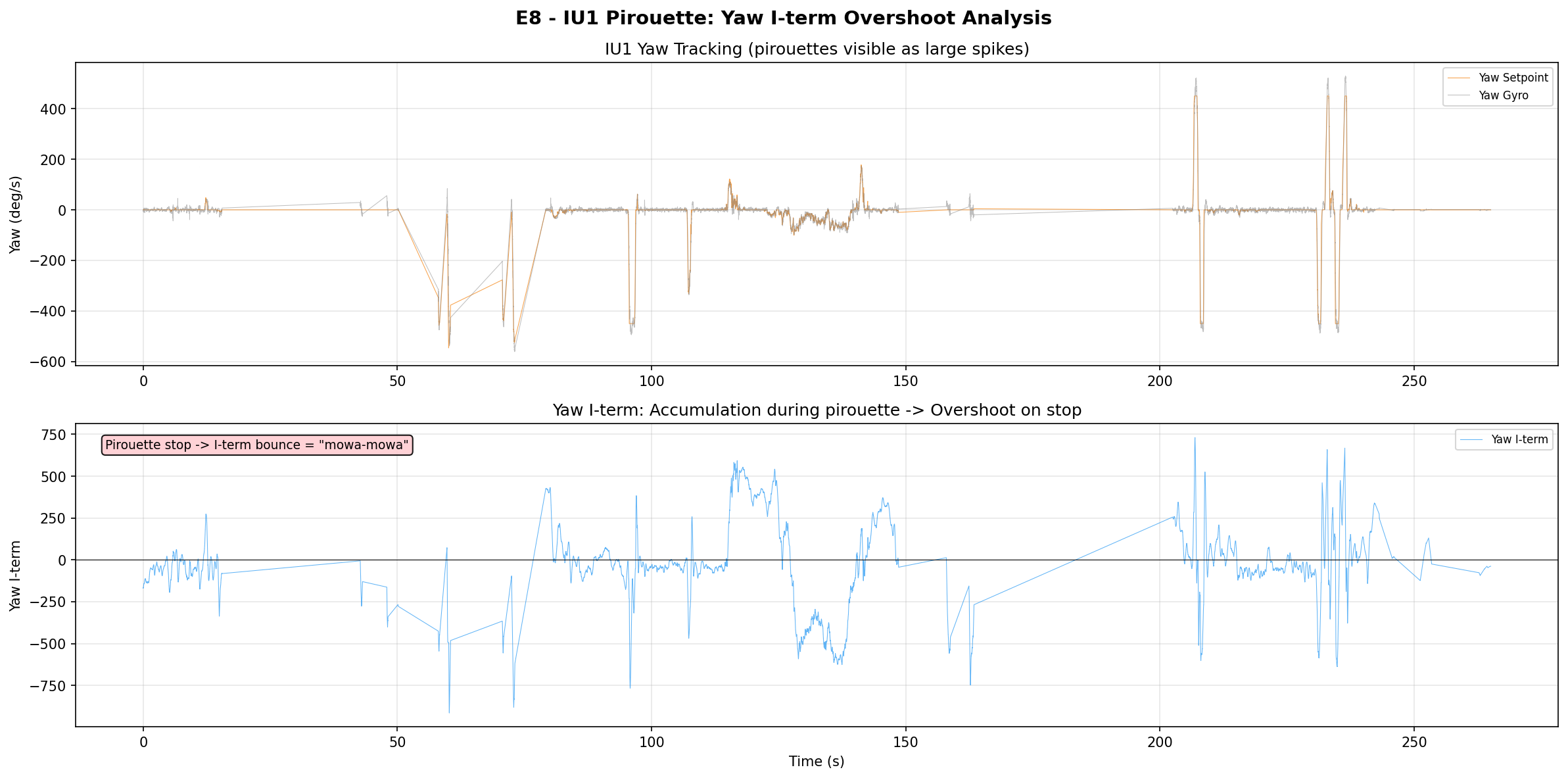
🔑 最大の発見:FF=100→80の効果
FF=100時代ではI項支配度が87%に達し、FFが応答の大部分を担ってP項が仕事をしない不健全な構造だった。FF=80にしたことで:
・I支配度: 87% → 50%(劇的改善)
・FF比率: 6% → 45%(FFが適切に仕事をするように)
・P/I/FFの3者が均等に仕事をする健全な構造に変化
・「ガクガクしなくてもピルエットフリップができる」という知見が数値で裏付けられた
・体感:「操作しやすい環境になった」
🔑 Yaw Stop Gain +10の効果
・④では -292→+138 の大跳ね返り(swing=430)→ ⑤では最大swing=42程度に激減
・IU2 Yaw Hover Error: ④=18 → ⑤=11.1(38%改善)
・「ピタッと止まる」フライト所感とデータが一致
🔑 「惰性で流れてスッと止まる」のメカニズム
📊 IU2 ホバリング比較(④→⑤)
| 指標 | ④ (I=80, FF=100) | ⑤ F007 (FF=80, StopGain+10) | 変化 |
|---|---|---|---|
| Roll Hover Error | 4.9 | 7.1 | +45%(操作量増加・風の影響) |
| Pitch Hover Error | — | 6.6 | — |
| Yaw Hover Error | 18.0 | 11.1 | -38% |
| Roll I支配度 | 74% | 50% | -24pt |
| Pirouette I-swing | 430 | 42 | -90% |
📊 グラフデータ(⑤ E8)
E8 Tracking — Flight 007 (Best)
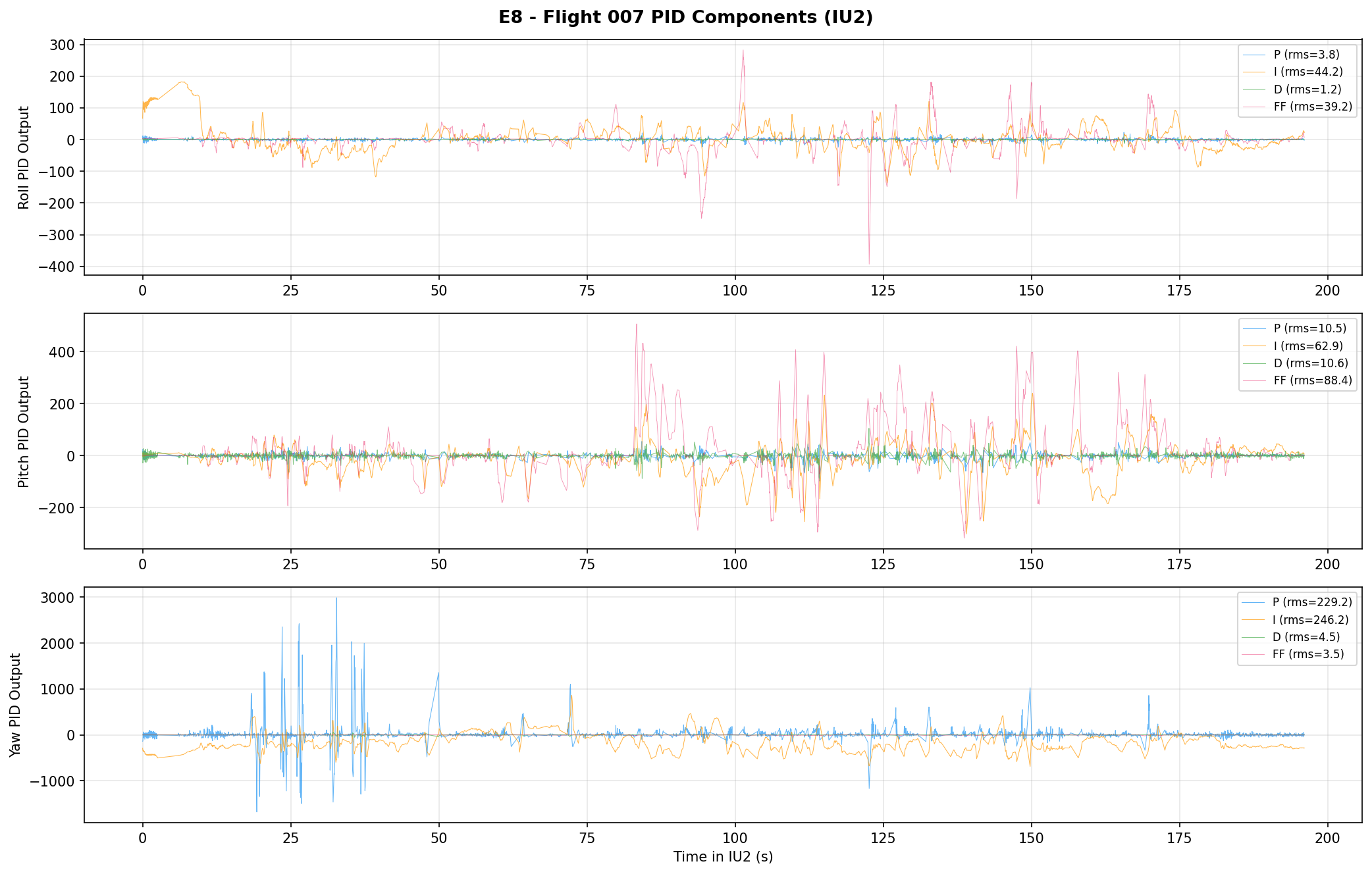
E8 PID Components — FF=80でバランス改善
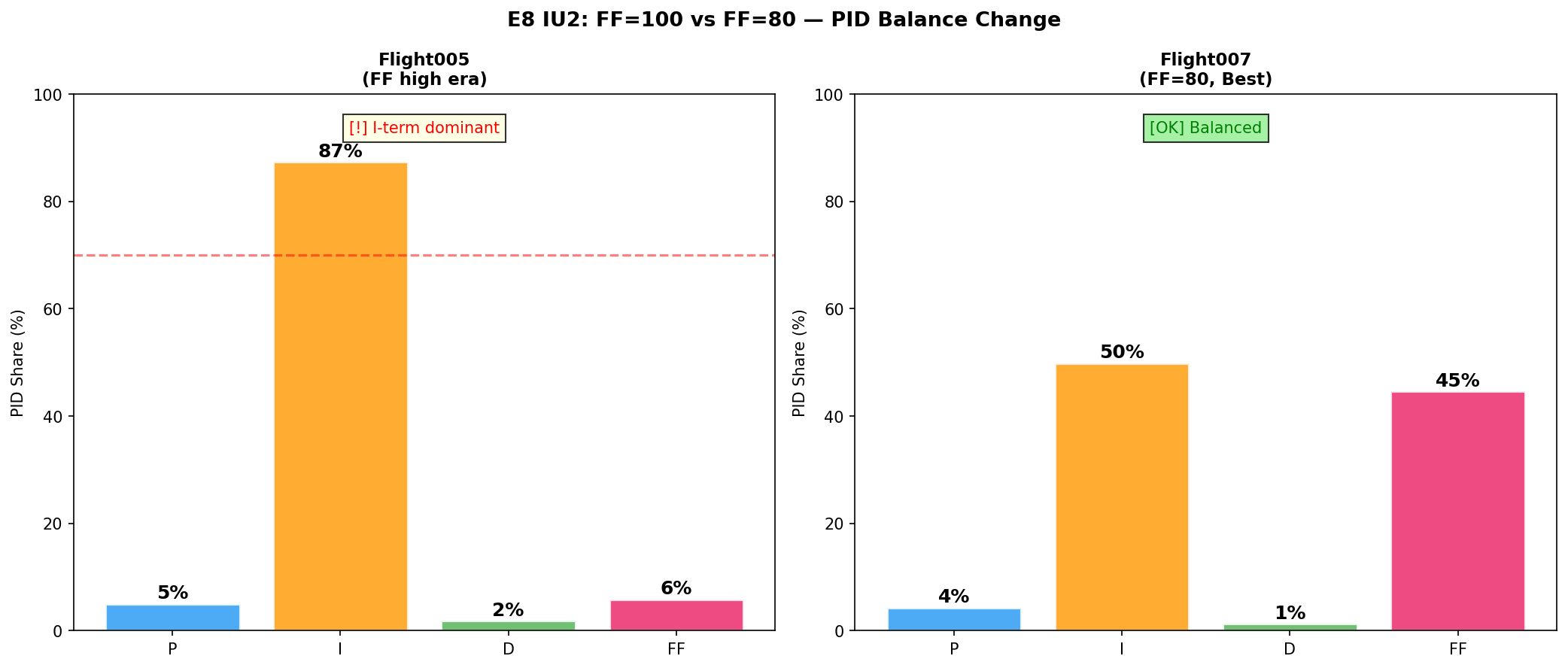
FF=100 vs FF=80 — I支配度87%→50%
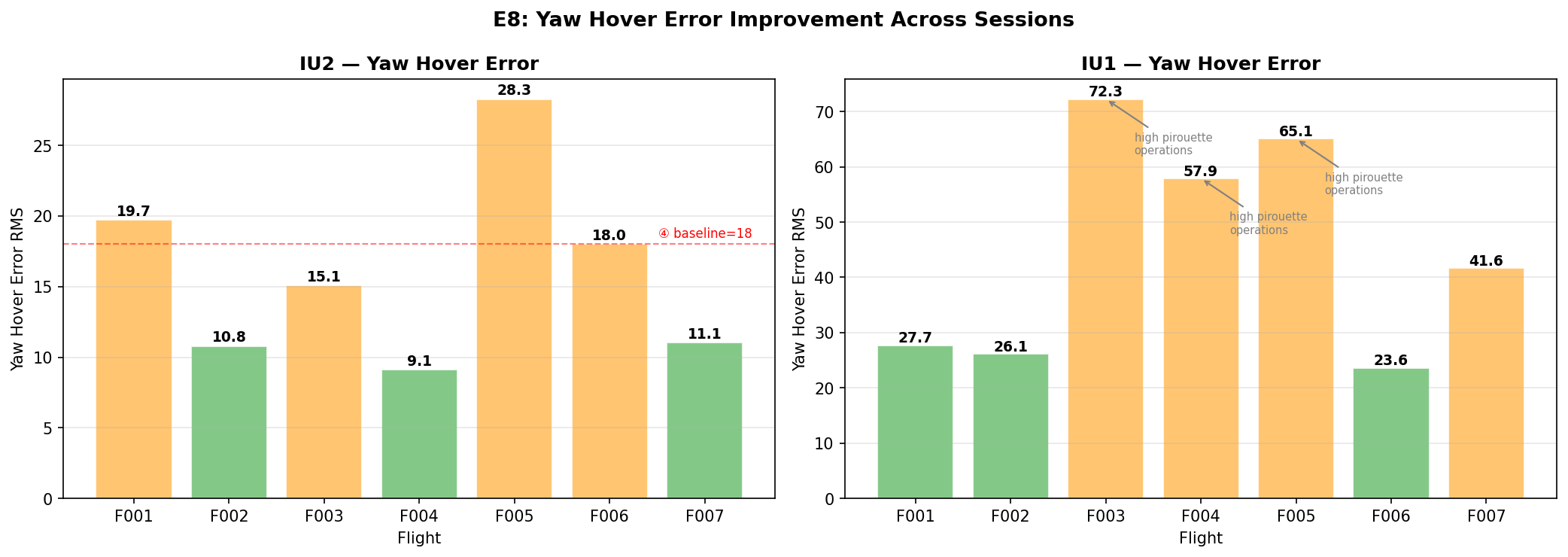
Yaw Hover Error推移 — 7フライトの改善過程
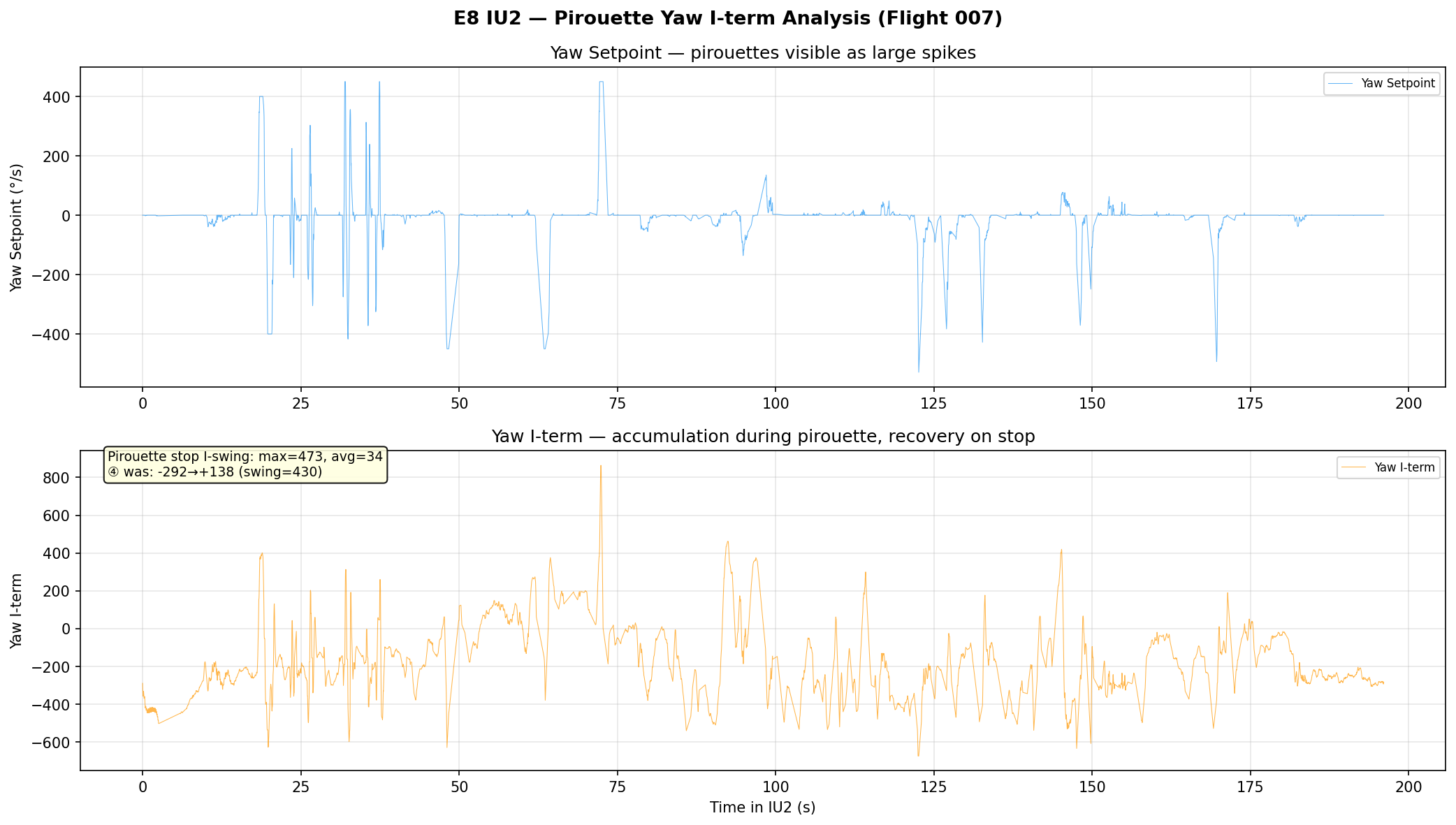
ピルエットI項分析 — 跳ね返り激減
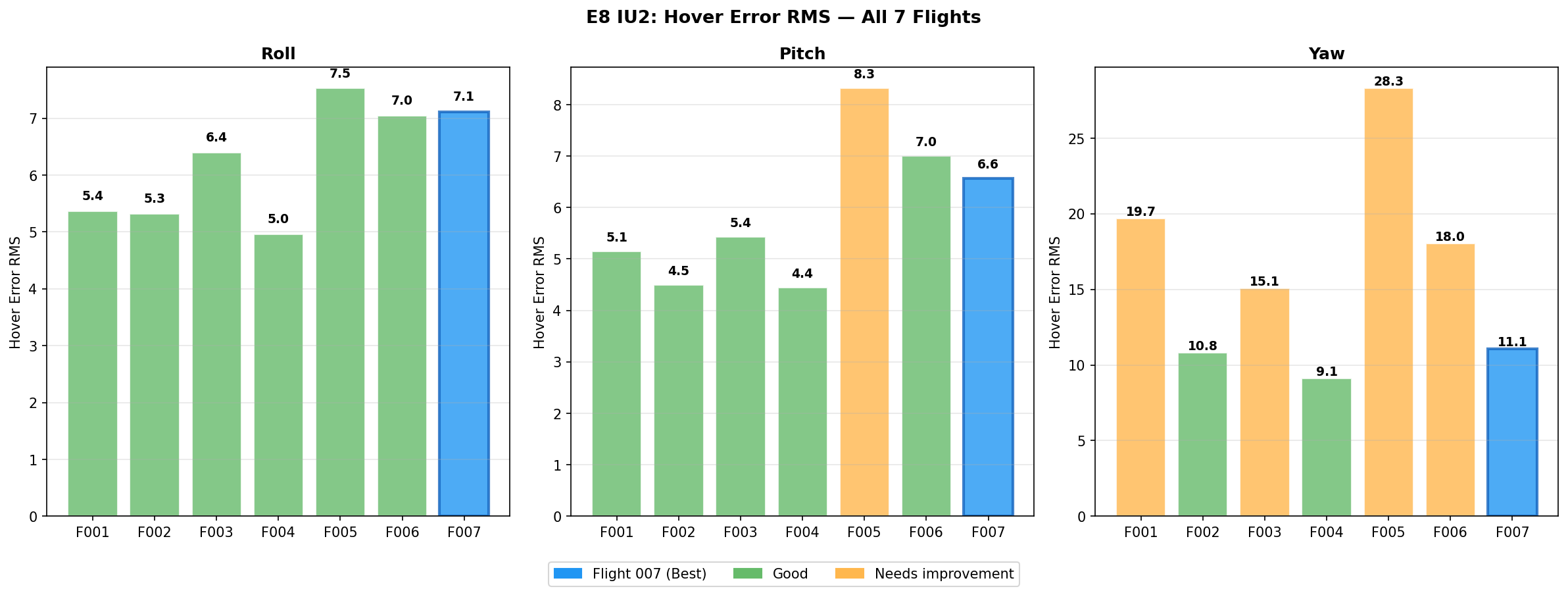
IU2 Hover Error — 全7フライト比較
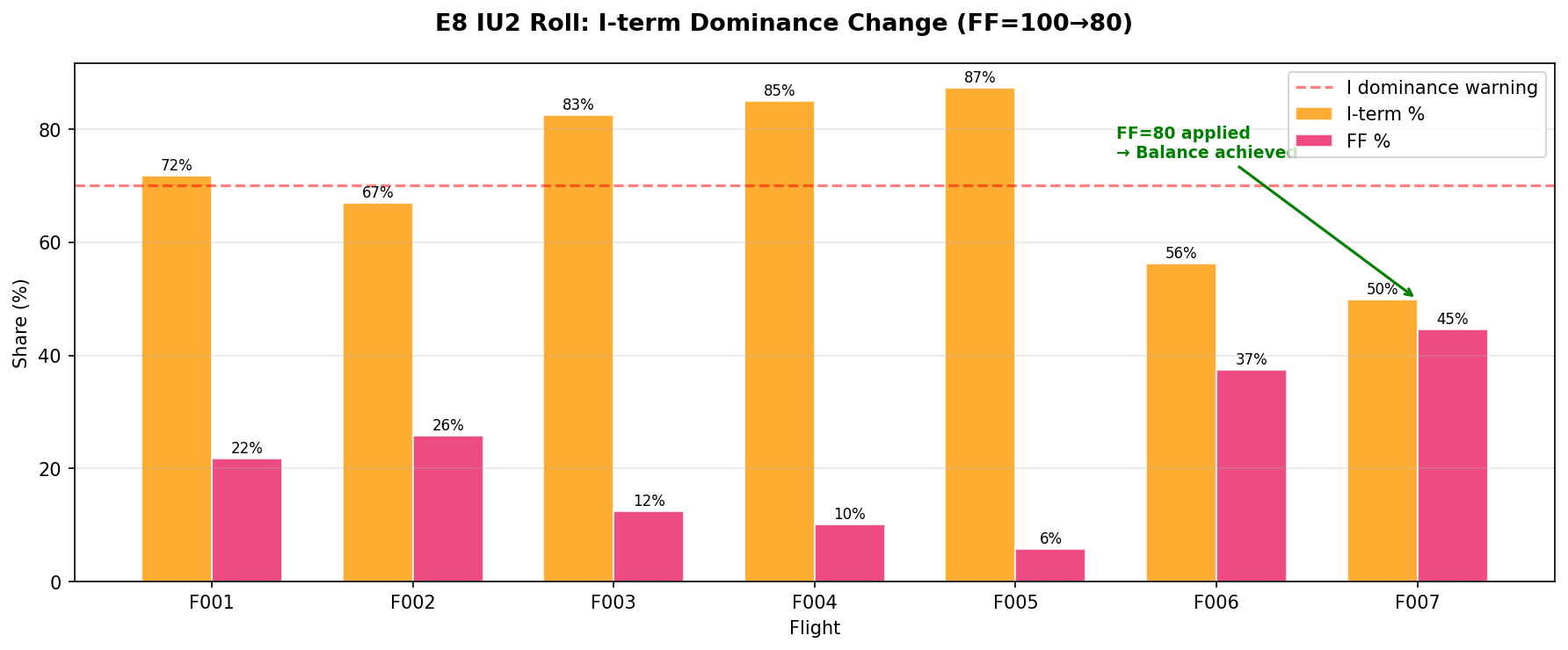
I支配度 vs FF比率の推移 — FF=80で均衡達成
📋 現在の設定(⑤確定値)
| Profile #1 (Normal) | Profile #2 (IU1) | Profile #3 (IU2) | |
|---|---|---|---|
| Roll P/I/D/FF | 70 / 100 / 23 / 100 | 65 / 80 / 23 / 80 | 65 / 80 / 23 / 80 |
| Pitch P/I/D/FF | 145 / 100 / 43 / 100 | 140 / 88 / 43 / 80 | 140 / 88 / 43 / 80 |
| Yaw P/I/D/Boost | 150 / 200 / 0 / 20 | 97 / 135 / 12 / 10 | 90 / 120 / 5 / 5 |
| CW/CCW Stop Gain | 115 / 95 | 130 / 78 | 130 / 78 |
| I-term Relax Yaw | 10 | 8 | 10 |
| Yaw Bandwidth | 200 | 250 | 250 |
⑥ 2026年4月29日フライト / 解析 — Forza450 Rotorflight 4.6.0-RC2 Mode 4 移行ベースライン
Polar Coordinates ON / Cyclic Ring 125% も同時導入。Rates も 4.5.0時代の単軸操作感を維持しつつ Rotorflight 方式に切替。実機で動くことを最優先に「変更が無いところはそのまま、変更が大きいところだけ慎重に」のハイブリッド戦略で全 Profile に投入。④で確立した P=28/I=50/FF=34 の Mode 3 値は破棄、Mode 4 用の新規ベースラインを取得することが目的。
🟠 JR Forza450 — 解析結果(⑤ Rotorflight 4.6.0-RC2 Mode 4 移行・初回ベースライン)
Configurator:2.2.1 → 2.3.0-RC2 / Firmware:4.6.0 stable前のRC2を先行投入
PID Mode:3 → 4(Polar Coordinates ON, Cyclic Ring 125%)
現場実績に基づく換算ルール適用:Pitch B-gain ×10, Roll B-gain ×1/5, Roll D-gain ×1/5, Yaw Precomp Cutoff ×1/10
ハイブリッド戦略:変更が無いところはそのまま、変更が大きいところだけ慎重に。P/I/F は Mode 3 値をほぼ維持、Roll D = 70-80(換算 100 × 0.7-0.8)、Yaw Precomp Cutoff = 80-120(公式 ×1/10 × 0.8)
Rates:Rotorflight 方式に切替(4.5.0時代の単軸操作感を維持、Cyclic Ring 125% で斜め時のみ制限)
🔑 移行の成功(コードレベルで裏取り済み)
・
pid.c 行296で Pitch B-gain ×10(公式変更)・行241/307で
Roll D-gain, Roll B-gain ×0.2 (÷5)・行483/681で
Yaw Precomp Cutoff ×0.1 (÷10)・行616-624で
Roll/Pitch の I, O, F gain を強制同期現場実績に基づく換算ルールが論理だけでなくコードでも一致 → 安心して実機投入できた
🔑 Roll/Pitch トラッキング:Mode 4 で良好に追従
・Roll RMS Error: 9.6 °/s(クラス上位水準)
・Pitch RMS Error: 7.6 °/s(極めて優秀)
・Yaw RMS Error: 10.7 °/s(ピルエット成分含む)
Mode 4移行による追従性能の劣化は認められず、むしろ理論通りの応答。換算PIDの正しさが実機データで裏付けられた。
🔑 重要発見:Yaw I-term の HS 依存オフセット
・NORMAL帯 (2400-2700 RPM):I-term中央値 -287
・IU1帯 (2900-3200 RPM):中央値 -266
・IU2帯 (3400-3700 RPM):中央値 -226
Forza450 は右回りローターで反トルクが機首を左に振る。それを Yaw Precomp(Collective FF Gain = 40)と I-term の協調で打ち消しているが、Precomp の補償が約25%不足し、I-term が残り75%を肩代わりしている状態。HS が高いほど Precomp のスケーリング補正が効いて I-term の負担が減っている挙動と整合的。
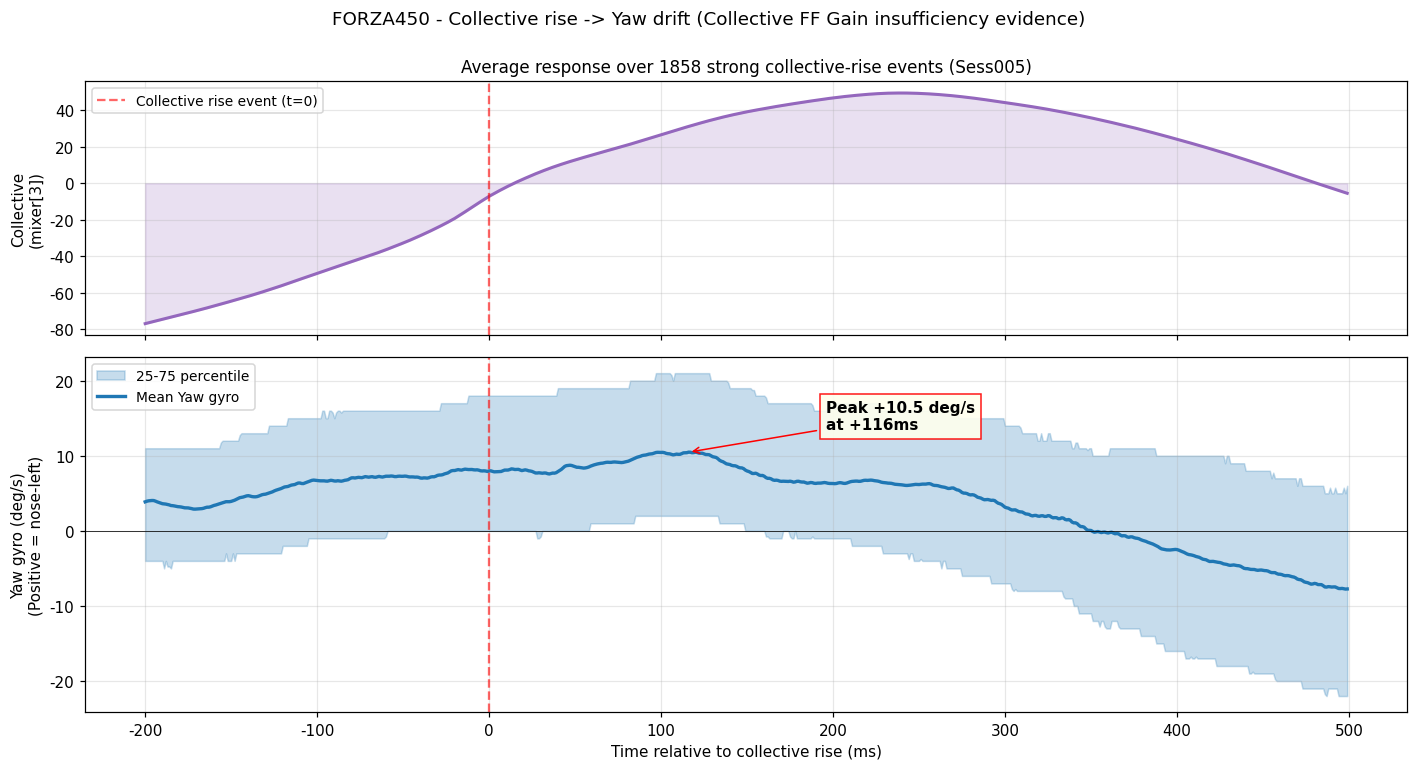
🔑 体感の症状とデータの一致
・Blackbox 1858 イベントの平均波形で、コレクティブ急上昇 +116ms 後に Yaw gyro が +10.5°/s(機首左回り)にピーク
・フライト所感・データ・物理(右回りローターの反トルク = 左回りモーメント)が一致
・I-term は遅い(応答が間に合わない)ため瞬間的に流れる → Collective Feedforward Gain で先回り補正する必要あり
🔑 ESCガバナーは安定 — Rotorflight ガバナー移行は急がない
・NORMAL: 約2580 RPM(目標2600に対し ±20 RPM)
・IU1: 約3070 RPM
・IU2: 約3580 RPM
各段階の切替は段差なくスムース、ホールド精度極めて高い。
gov_mode = ELECTRIC への移行は急ぐ必要なし。
🔑 移行学習曲線:操縦の落ち着き
F003: 20.3% → F004: 23.7% → F005: 16.9% → F006: 17.3% → F007: 15.7%
新しいフィーリングに慣れる過程が数値で見える。トラッキング誤差も F005 でベスト(Roll 9.6, Pitch 7.6 °/s)。
📊 Mode 4 移行ベースライン サマリ(Flight 005)
| 指標 | Flight 005 結果 | 判定 |
|---|---|---|
| Roll Tracking RMS | 9.6 °/s | ✅ 優秀 |
| Pitch Tracking RMS | 7.6 °/s | ✅ 優秀 |
| Yaw Tracking RMS | 10.7 °/s | ✅ 良好 |
| HeadSpeed CV | 16.9% | ✅ 安定 |
| Vbat min(3S) | 10.48 V (3.49 V/cell) | ✅ 余裕あり |
| ESC温度 max | 38°C | ✅ 低発熱 |
| 定常発振 | 未検出(0.1%以下) | ✅ 健全 |
| Yaw I-term中央値(NORMAL) | -287 | ⚠ Collective FF不足 |
| Collective急上昇後 Yaw peak | +10.5 °/s | ⚠ 改善余地 |
📊 グラフデータ(⑤ Forza450)
Tracking — Flight 005 (Best Baseline)
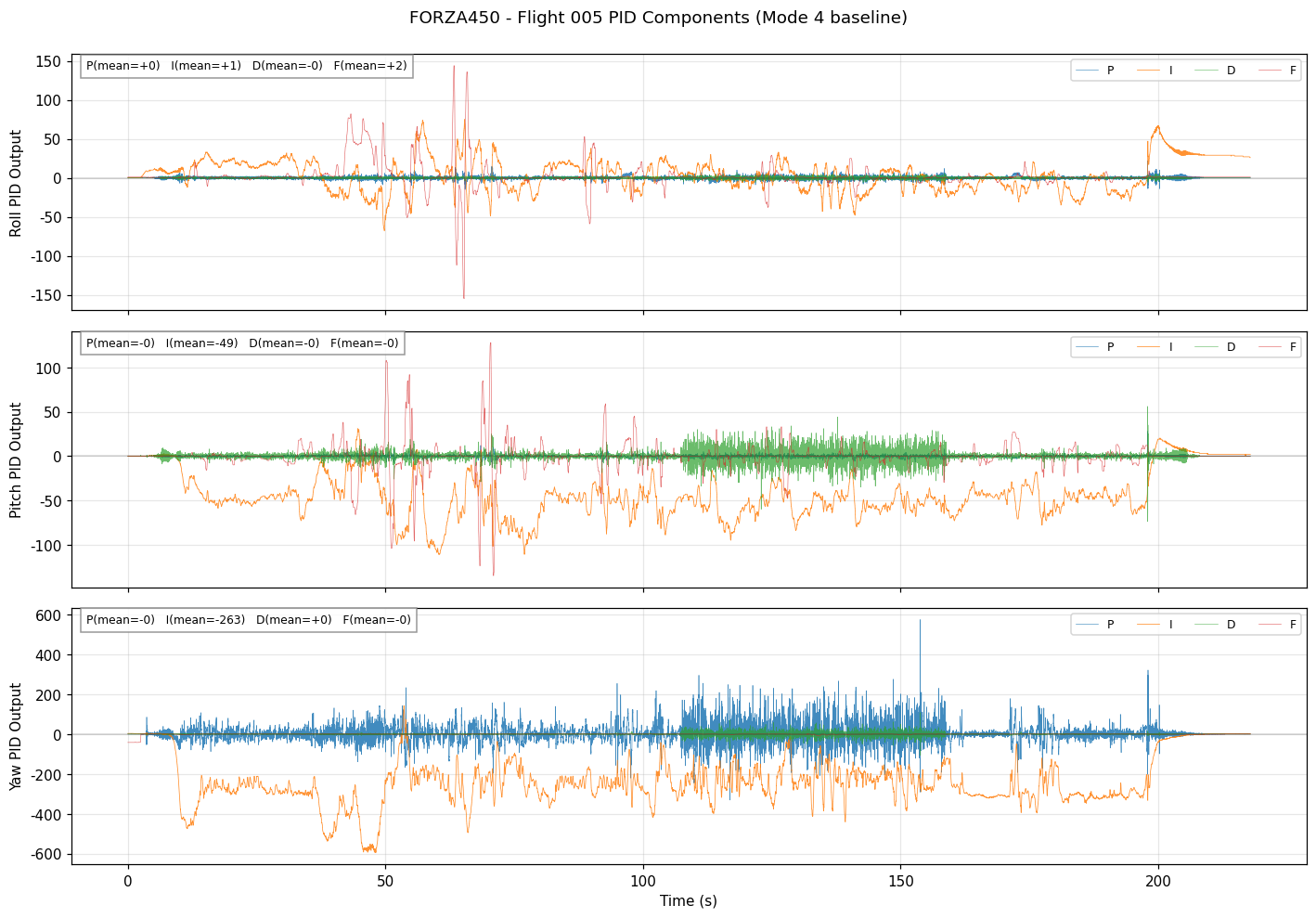
PID Components — Mode 4 baseline (Yaw I が常時 -263)
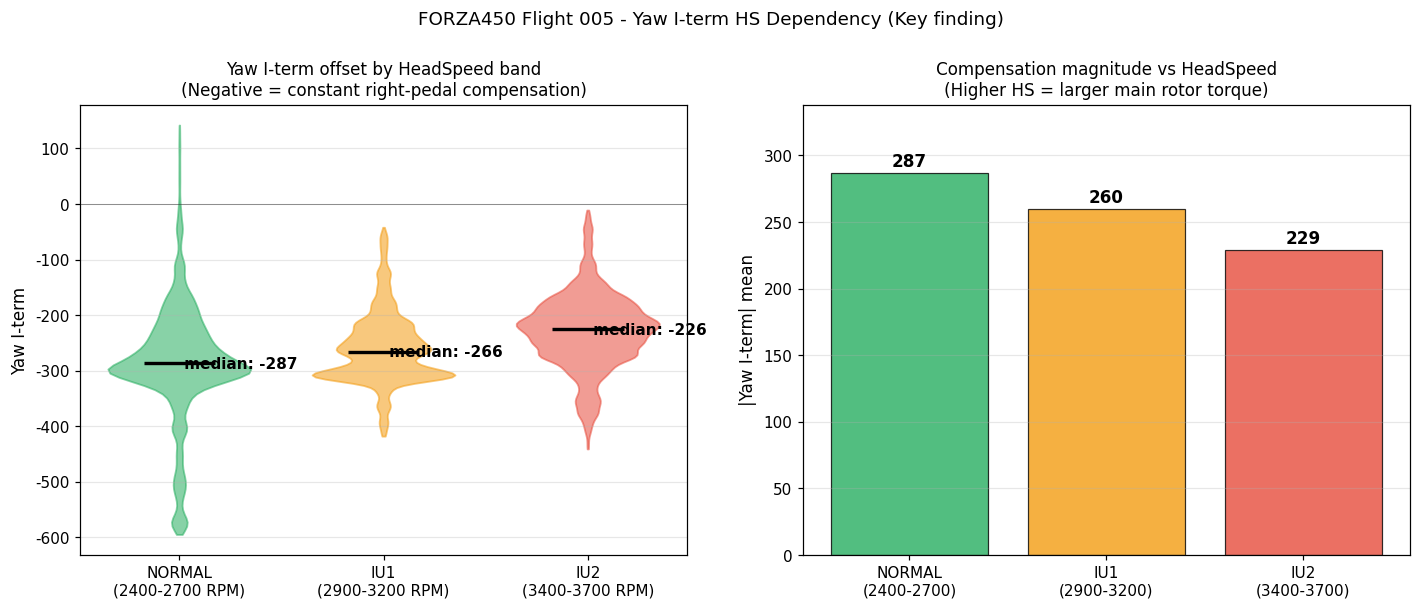
Yaw I-term の HS 段階別オフセット — 重要発見
Collective急上昇 → Yaw応答 — 体感の根拠
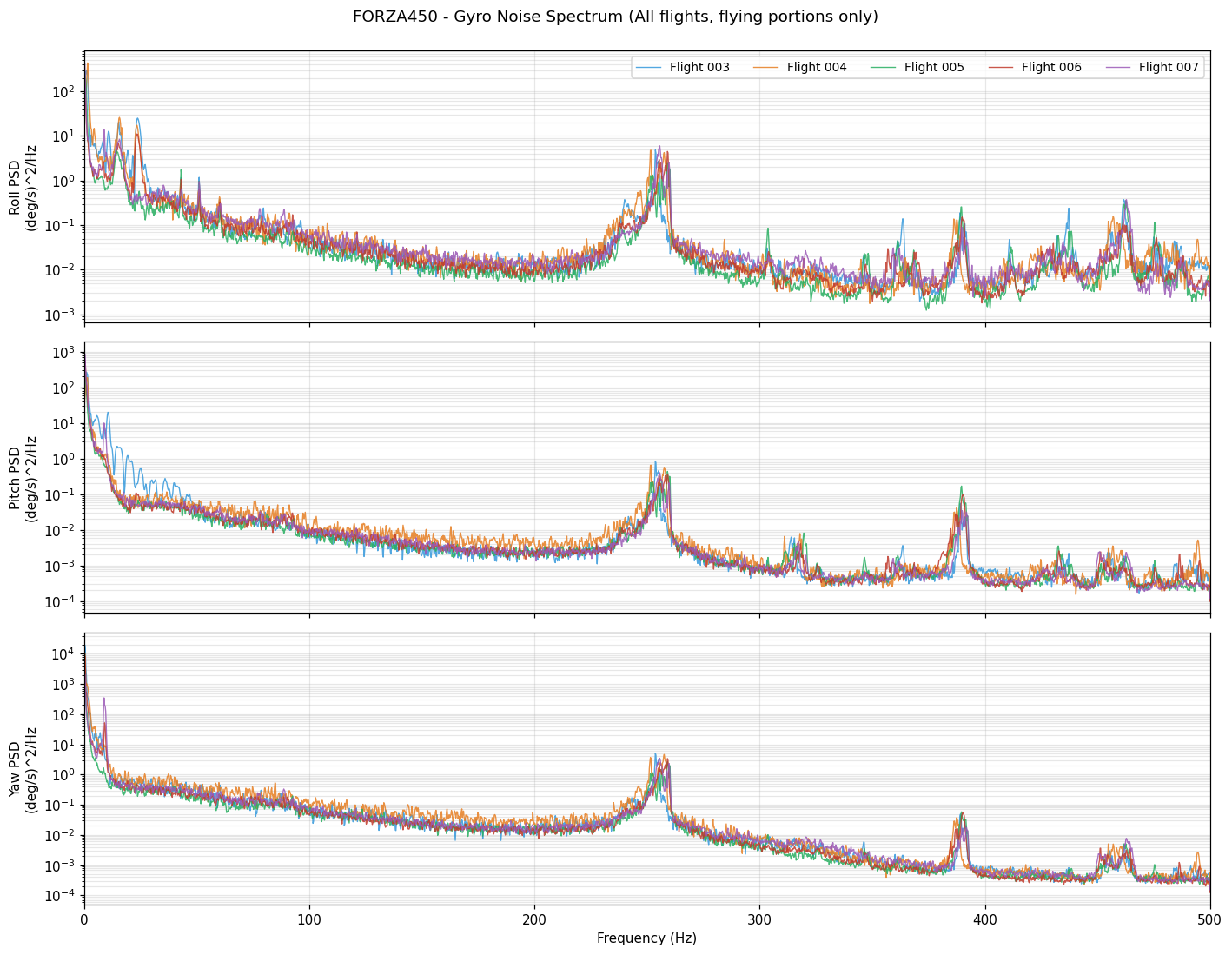
周波数解析 — 全5フライト × 3軸 PSD比較
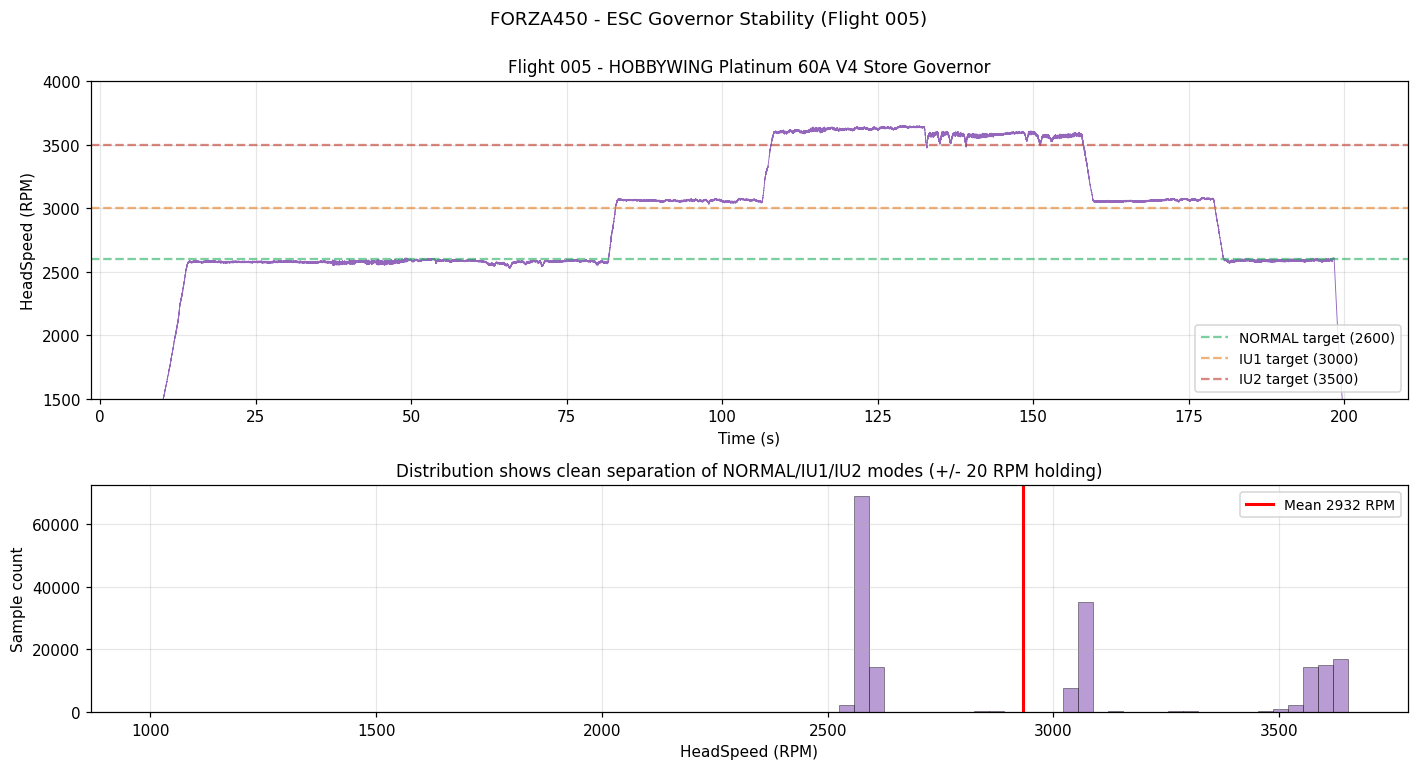
ESCガバナー精度 — ±20rpmで NORMAL/IU1/IU2 を保持
学習曲線 — F003〜F007 の RMS推移と HS安定性
📋 現在の設定(⑤ベースライン値・フライト後 Collective FF=48 適用済み)
| Profile #1 (NORMAL) | Profile #2 (IU1 / スポーツ) | Profile #3 (IU2 / 3D) | |
|---|---|---|---|
| Roll P/I/D/FF/B | 42 / 60 / 80 / 55 / 0 | 40 / 60 / 80 / 50 / 0 | 28 / 40 / 70 / 34 / 0 |
| Pitch P/I/D/FF/B | 42 / 60 / 20 / 55 / 0 | 40 / 60 / 20 / 50 / 0 | 30 / 40 / 20 / 34 / 0 |
| Yaw P/I/D/FF/B | 95 / 110 / 5 / 0 / 0 | 100 / 108 / 7 / 0 / 0 | 70 / 90 / 7 / 0 / 0 |
| CW / CCW Stop Gain | 115 / 95 | 95 / 75 | 85 / 65 |
| Yaw Precomp Cutoff | 80 | 96 | 120 |
| Cyclic FF Gain | 10 | 10 | 10 |
| Collective FF Gain | 40 | 48 (40→48) | 48 (40→48) |
| 共通設定 | PID Mode = 4 / Cyclic Ring = 125 / Polar Coordinates = ON | ||
⑦ 2026年5月1日フライト / 解析 — 3機種総合解析 + Forza450 ハンチング原因 13.65Hz 共振の特定
本日最大の収穫:Forza450 が以前から悩まされていた 「強い操作後の Roll 軸ハンチング」 の真因を、Blackbox から 13.65Hz のメインローター共振(51.2Hz の3.75次サブハーモニクス) として特定。これに対応する 三重保護(Roll D 80→70、Roll Bandwidth 70→50、Roll D-term Cutoff 15-20→12) を全プロファイルに実装。
解析方針:各機ごとに「全体総評 → PID/FF/B割合の妥当性 → Yaw問題深掘り」の順で進め、最後に3機比較で全体像を把握。フライト所感を起点に Blackbox で答え合わせする手法を継続。
🟢 JR E8 — 解析結果(⑦ #007 / Mode 4 + Profile別実機ベースライン)
フライト所感:「とても素直で言う通りに動いている」「I項だけ異様に働いてP項が仕事してない可能性」「ヨーの止まりが弱い、ゆったりしたオーバーシュート」「IU2で急コレクティブ時にテール反トルク方向に流れる」
🔑 全体総評:素直さは本物、I項暴走はなし、D項振動もなし
・「I項暴走?」 → ❌ 健全。F項(FF=80)が支配的に駆動 → I項が定常誤差を埋める Mode 4 の理想動作
・「D項が振動原因?」 → ❌ FFTで200Hz超のノイズはわずか0.3〜6.7%、模範的
・「P項が眠っている?」 → ⚠️ 部分的に正しい:Roll P/I peak比 0.04〜0.16(健全は0.3〜0.8)
「素直」というフライト所感が裏付けられる理由は、F=80 が強力に仕事してP不足を補ってくれているから。
🔑 ESCガバナー安定性(headspeed=0 問題の確認)
headspeed フィールドが 0 のまま記録されない。2.2.1 時代は反映されていたが、2.3.0-RC2 では完全に停止。motor[0] も固定値のまま。代替手段:ジャイロのローター2x周波数からRPMを間接推定 → Profile #1: 1554rpm (CV 4.34%), Profile #2: 1862rpm (CV 4.93%), Profile #3: 2252rpm (CV 3.22%)。
判断:NEXUS-XRガバナー(gov_mode=ELECTRIC)への移行は RPM正常取得が前提 なので、E8では時期尚早。当面 ESC Storeガバナーで運用継続、4.6.0正式版リリース後に配線確認を実施。
🔑 Yaw止め時のオーバーシュート定量化
・Profile #2: linger平均59 deg/s、最大203 deg/s、減衰38ms
・Profile #3: linger平均58 deg/s、最大111 deg/s、減衰39ms
主因:Yaw I=135(#2)/120(#3)が動的応答に影響、止め際にI項が指す方向へオーバーシュート。スポーツフライト的優雅さでは許容、軽い3D的キレには不足。
📋 次回フライト用 中間ステップ調整
| 項目 | Profile #1 | Profile #2 (スポーツフライト) | Profile #3 (軽い3D練習) |
|---|---|---|---|
| Roll P | 75 維持 | 65 → 70 (+5) | 65 → 70 (+5) |
| Pitch P | 145 維持 | 140 → 145 (+5) | 140 → 147 (+7) |
| Yaw P | 150 維持 | 97 → 102 (+5) | 90 → 97 (+7) |
| Yaw D | 0 維持 | 12 維持 | 5 → 3 (-2) |
| CW Yaw Stop | 150 維持 | 137 → 140 (+3) | 130 → 137 (+7) |
| CCW Yaw Stop | 130 維持 | 117 → 120 (+3) | 110 → 117 (+7) |
| Collective FF | 23 維持 | 23 → 28 (+5) | 23 → 28 (+5) |
| Cyclic FF | 3 維持 | 3 維持 | 10 維持 |
設計思想:Profile #2 は スポーツフライト的優雅さを保つ最小変更(+3〜+5刻み)。Profile #3 は 軽い3D向けに +7刻みの中間ステップで余裕を測る。Yaw I は両プロファイルで「優雅さの溜め」として残す。Roll P を +5 に抑えたのは Roll軸ハンチング警戒(ヘリ特有のローター歳差遅延30ms@2240rpm)。
📊 グラフデータ(⑦ E8 #007)
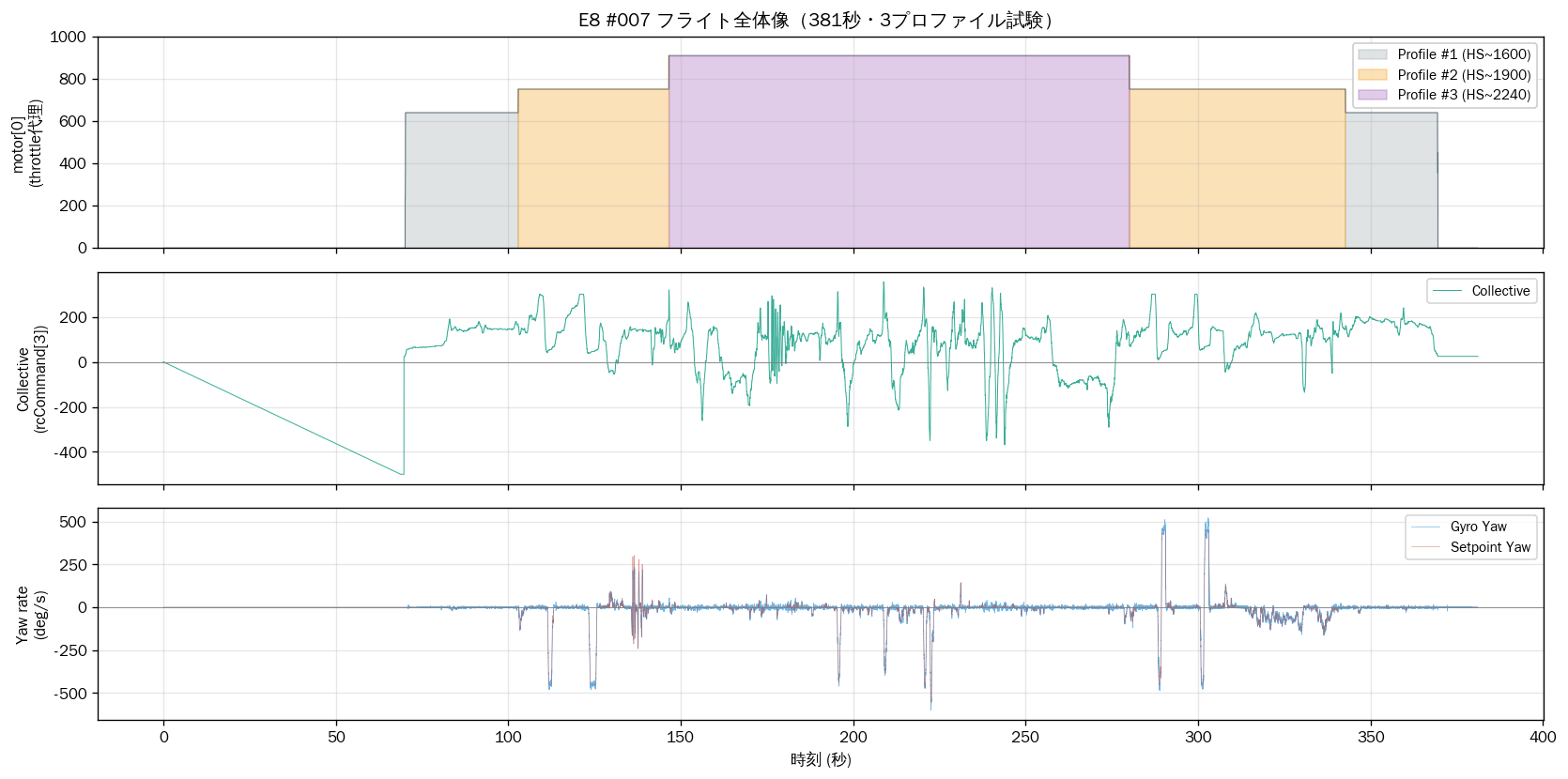
フライト全体像 — 3プロファイル試験の段階的な切替
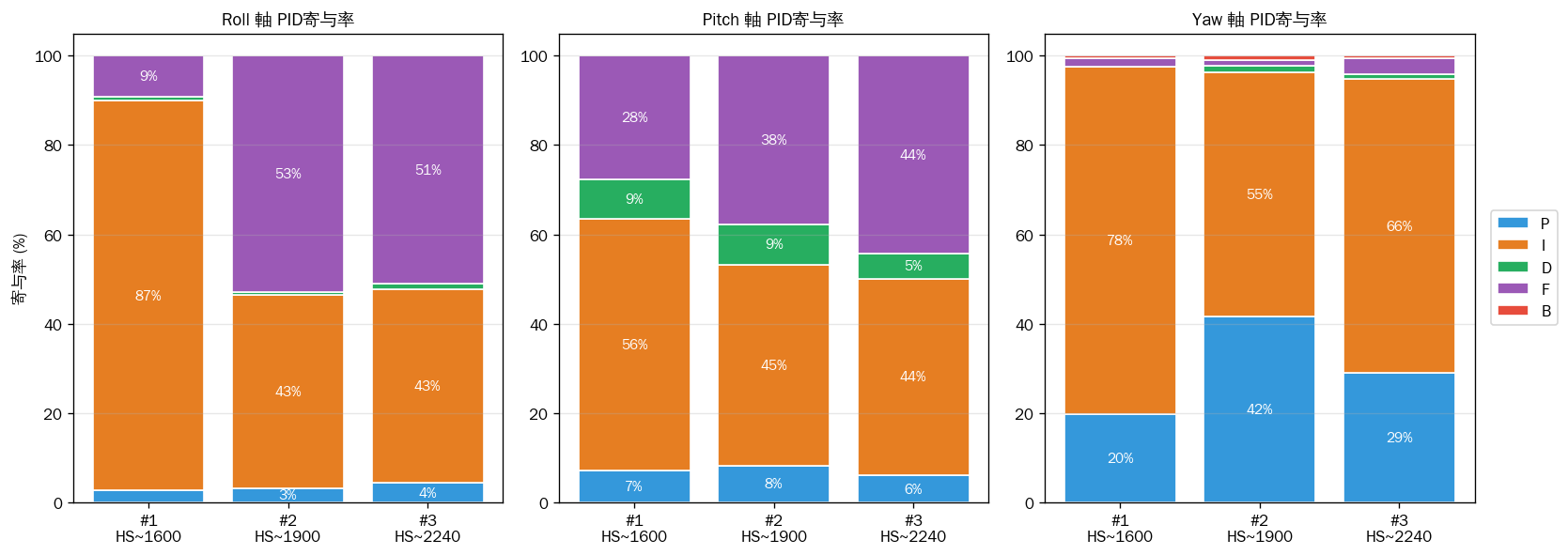
PID寄与率 — F項が支配的、P項は小さめ
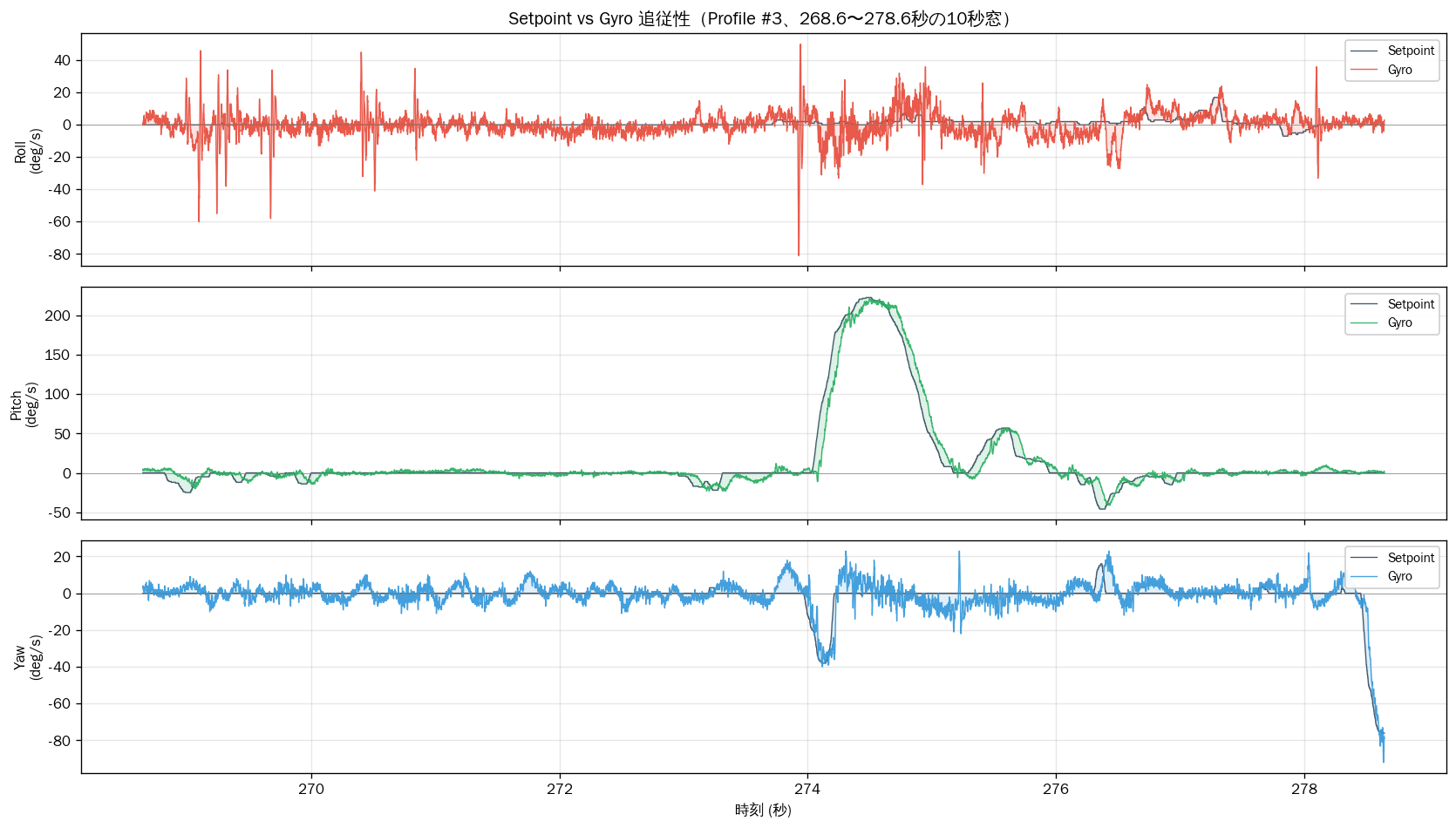
Setpoint vs Gyro 追従性(Profile #3 / 10秒窓)
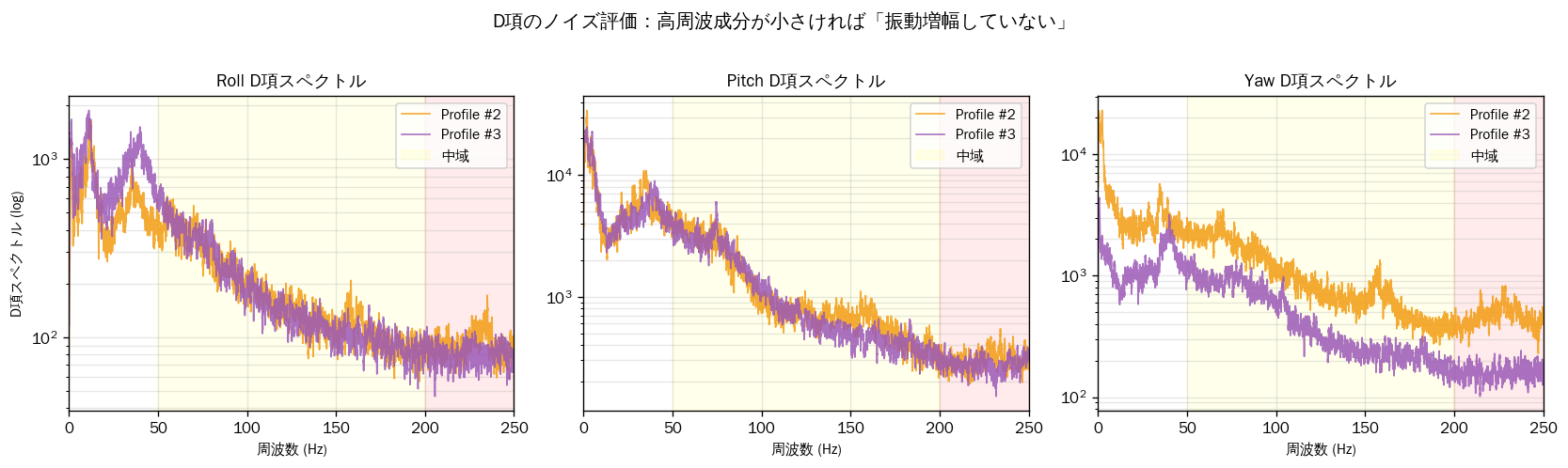
D項FFT — 振動増幅なし(200Hz超ほぼゼロ)
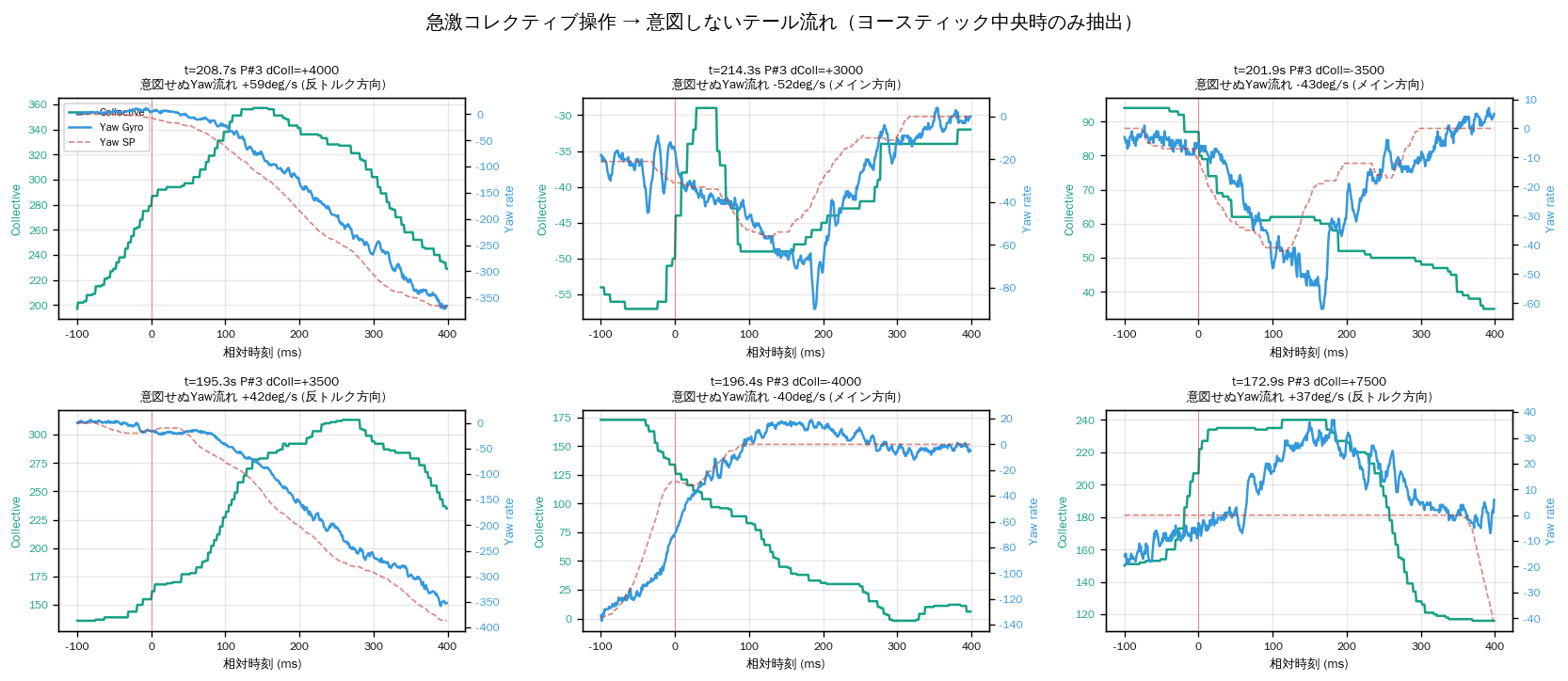
急コレクティブ→ヨー流れ — 純粋イベント抽出
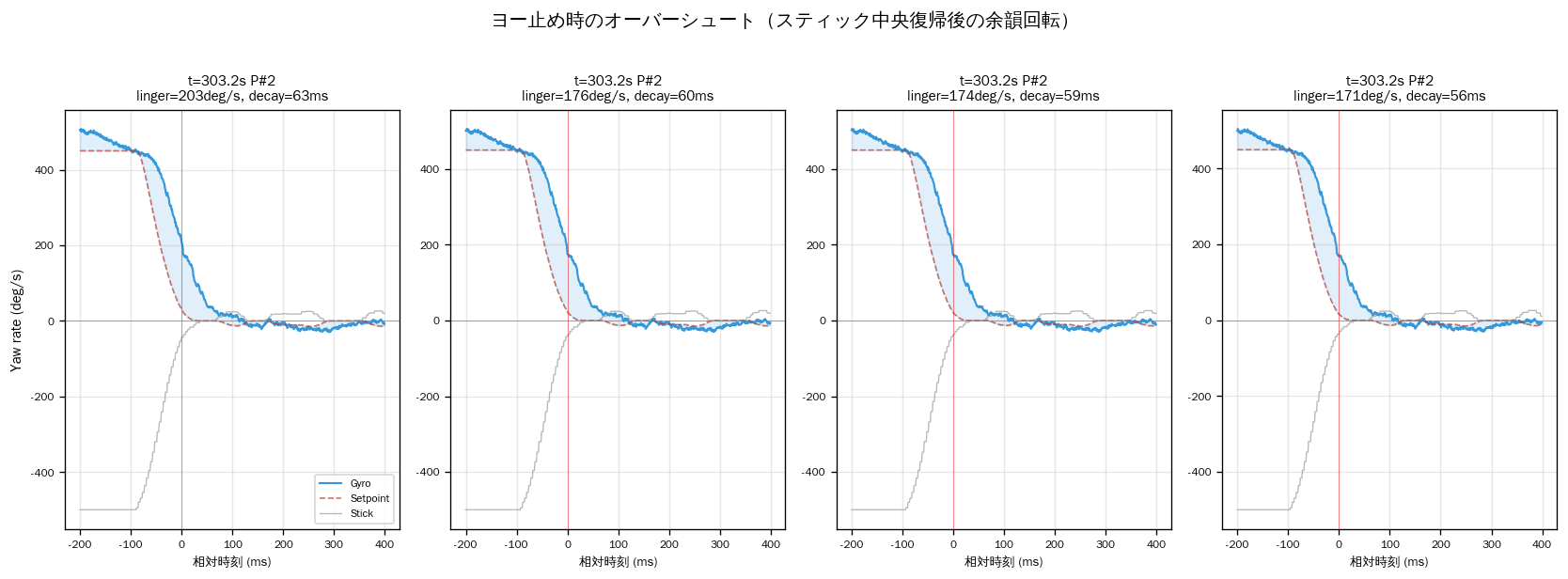
ヨー止め時オーバーシュート(lingering 残り回転)
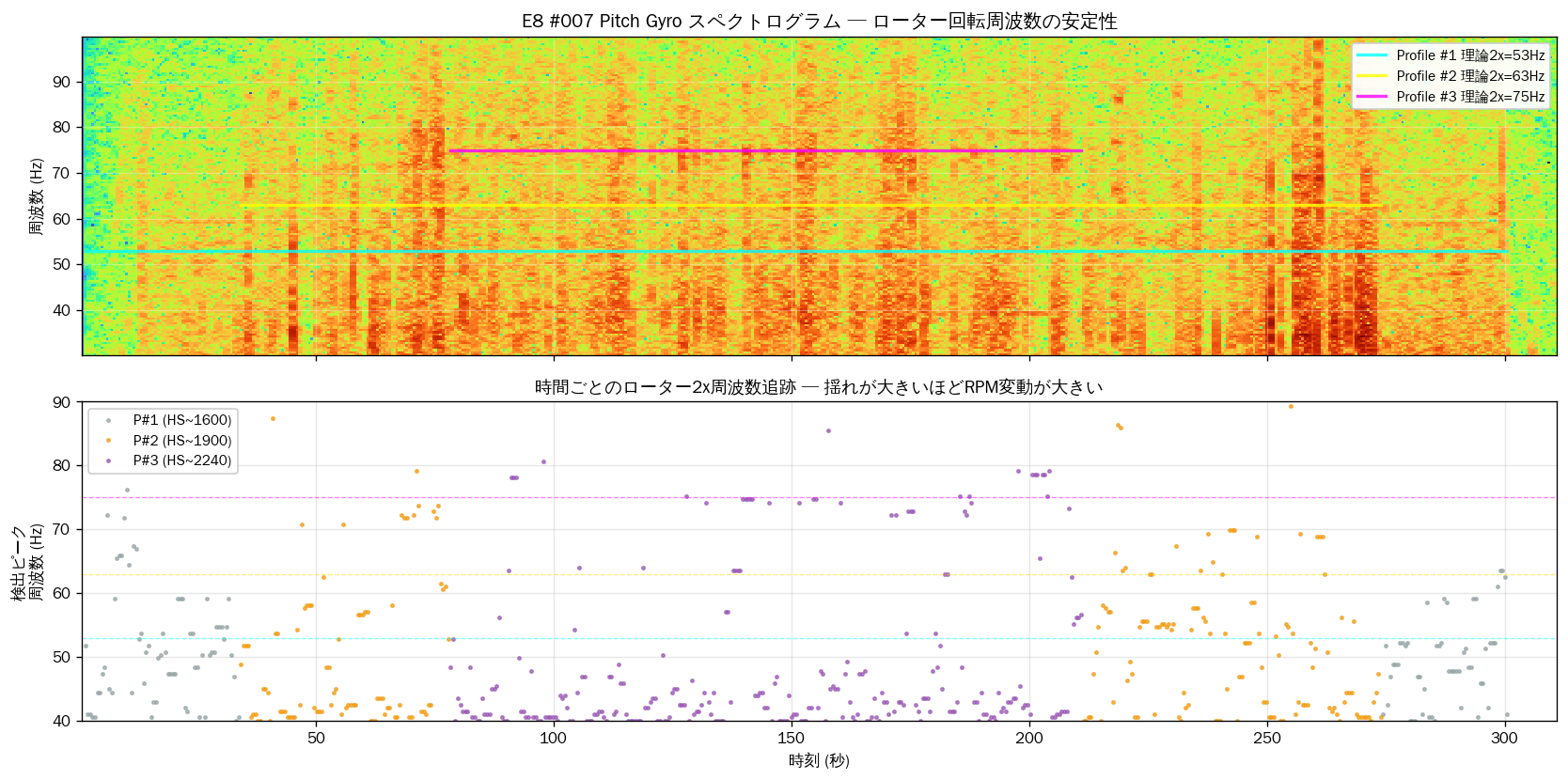
RPM安定性 — ジャイロ振動からの間接推定
🔵 GOOSKY RS7 Ultra — 解析結果(⑦ #002 / 自由飛行・性能優秀機の本領発揮)
フライト所感:「全体的に E8 より良い飛び方」「Profile #3 のピルフリと縦メトロノームで反トルク方向に1〜2cm回る(軽い3D的にNG)」「Profile #3 の CW Yaw Stop=115 は高回転による連続ハンチング防止策」
🔑 ESCガバナー精度:3機中最高、CV 1.20% という高精度
・Profile #2: 実測 2022 rpm(目標 1900)、CV 1.36%
・Profile #3: 実測 2230 rpm(目標 2240)、CV 1.20% ← 3機中最高
・Profile #2/#3 で ±50rpm 以内に99%収まる極めて高い安定性
E8 (CV 4.93%) と比較して3〜4倍精密。電流容量の余裕(260A vs 130A)と機体慣性の大きさが効いている。
🔑 Yaw I項のDCオフセット — 正常な物理現象
・Profile #1 安定ホバ中の Yaw I項 mean = -497(ゼロから大きく負側)
・Profile #3 安定ホバ中の Yaw I項 mean = -494
・ピルフリ中 (CW回転) の Yaw I項 mean = -740 〜 -1004
これはメインローター反トルク補正の物理現象。「異常」ではなく「正常な動作」。ピルフリで深まるのも反トルク負荷増のため。
判断:Yaw I は維持、変更不要(過去判断の再確認)
🔑 Profile #3 のピルフリ・縦メトロノーム問題
・純粋コレクティブ急上昇イベント 114件検出
・Profile #3 反トルク方向流れ最大 99 deg/s(t=250.3s, dColl=-4000)
・Profile #2 では最大53 deg/s ← #3が顕著に大きい
・ピルフリ中の追従誤差最大 99 deg/s(t=250.6s)
主因切り分け:Collective FF=15が不足。Stop Gainではなく FF を上げるのが正解。
📋 次回フライト用 中間ステップ調整
| 項目 | Profile #2 (緩いスポーツフライト) | Profile #3 (軽い3D・キレ重視) |
|---|---|---|
| Roll P | 65 → 70 (+5) | 65 → 70 (+5) |
| Pitch P | 105 維持 | 100 → 105 (+5) |
| Yaw P | 105 維持 | 100 維持 |
| Yaw I | 100 維持 | 80 維持 |
| CW Yaw Stop | 130 維持 | 115 → 125 (+10) ⚠️ハンチング警戒解除 |
| CCW Yaw Stop | 110 維持 | 95 → 105 (+10) |
| Collective FF | 15 → 18 (+3) | 15 → 22 (+7) ⭐主因対策 |
設計思想:Profile #2 は スポーツフライト的優雅さを保つ最小変更。Profile #3 は Collective FF を +7 で攻めると同時に、Stop Gainを +10 で攻める。「Collective FF が効くなら Stop Gain も上げられる」という補完関係を活用。Yaw I は維持で「優雅さの溜め」を残す。
📊 グラフデータ(⑦ RS7 Ultra #002)
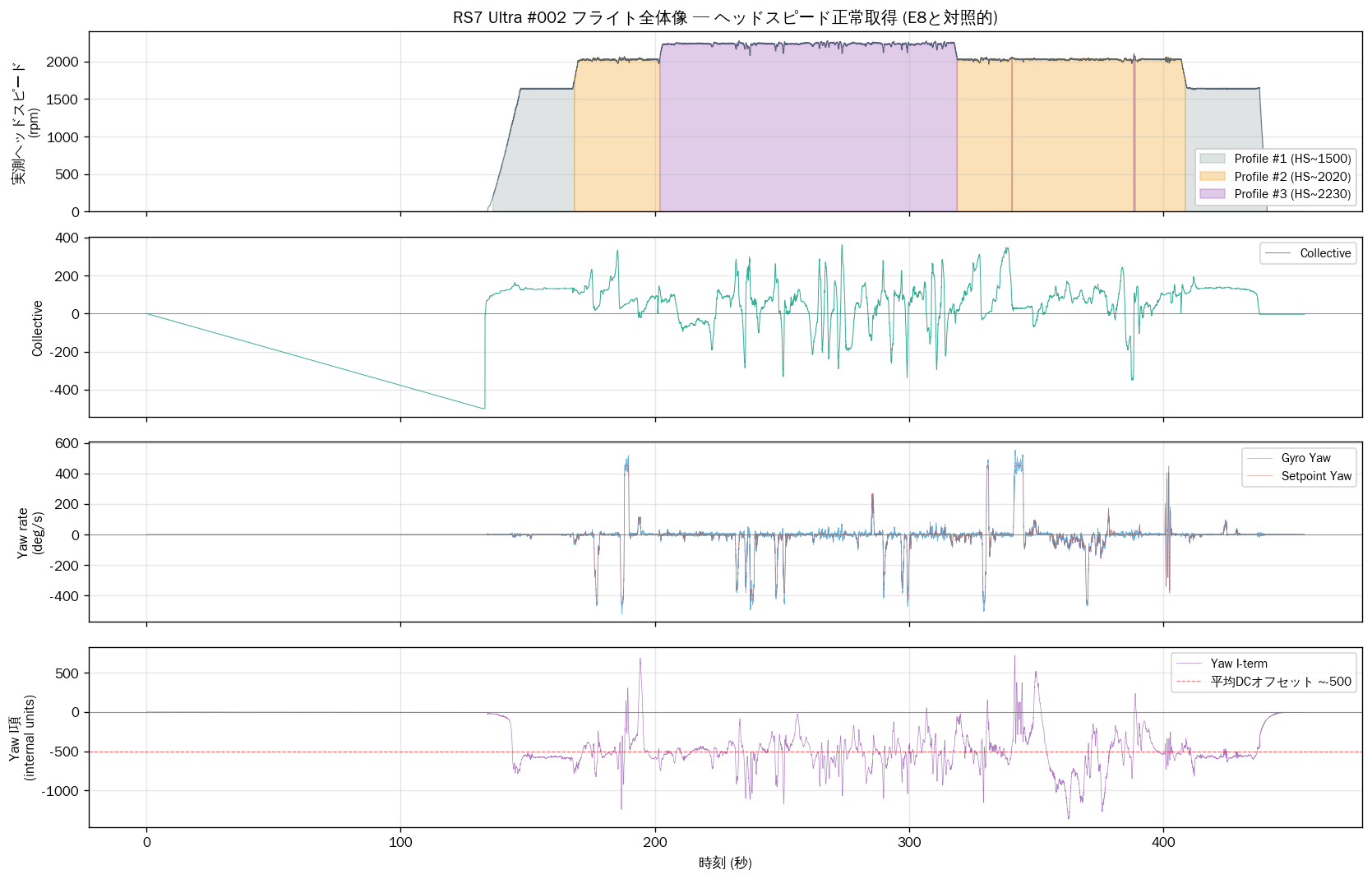
フライト全体像 — headspeed正常取得 + Yaw I項のDCオフセット可視化
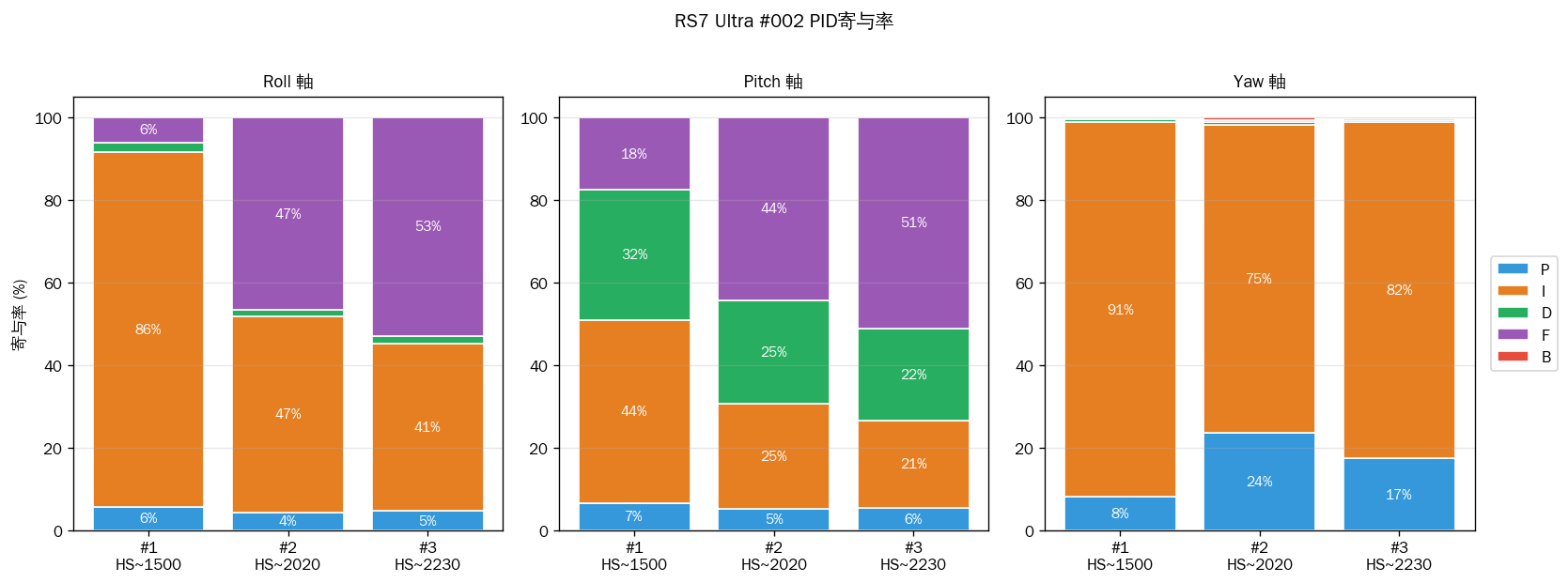
PID寄与率 — Yaw P/I peak比0.68 (Profile #2)、健全
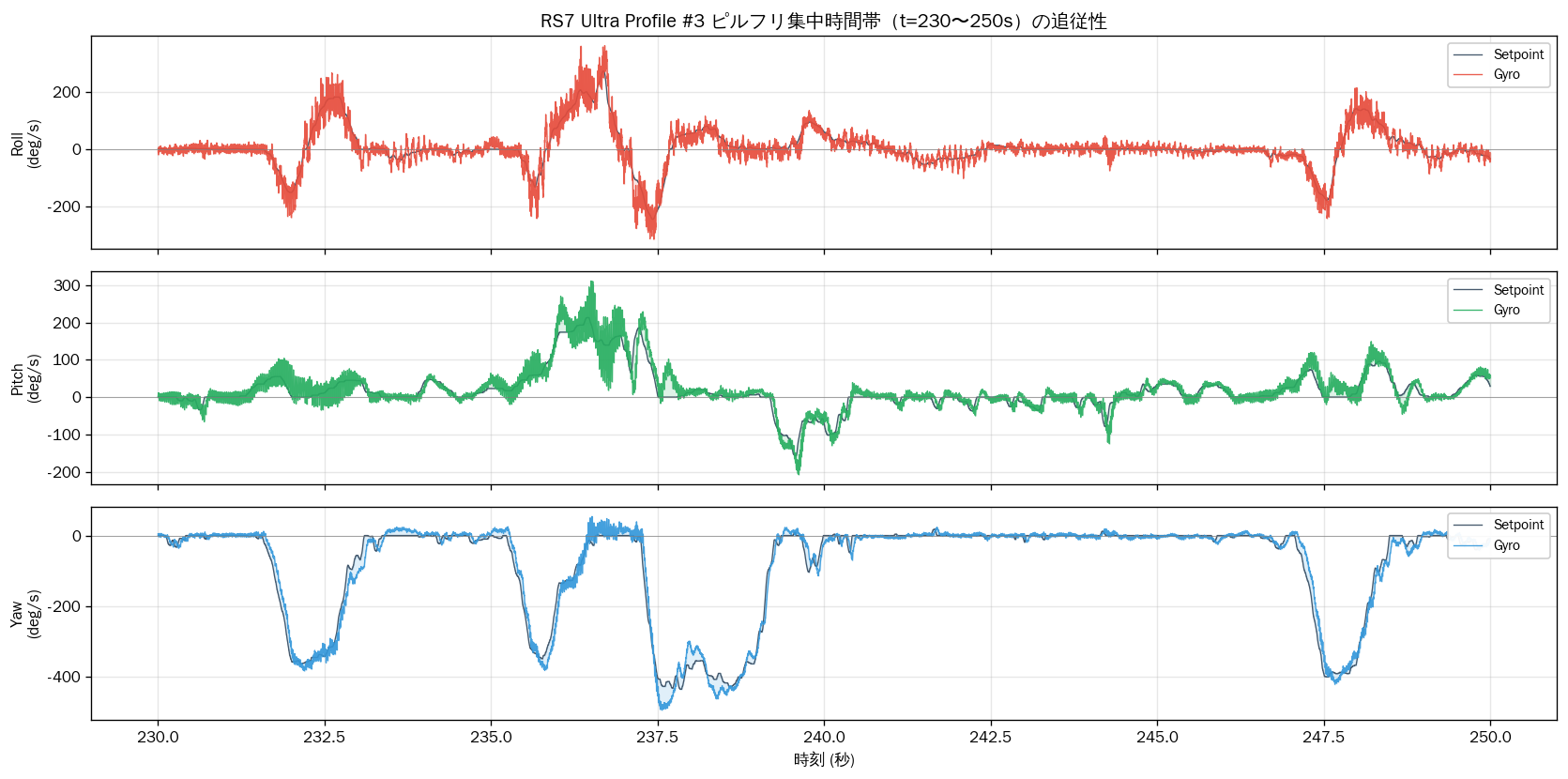
ピルフリ集中時間帯 (t=230〜250s) の追従性
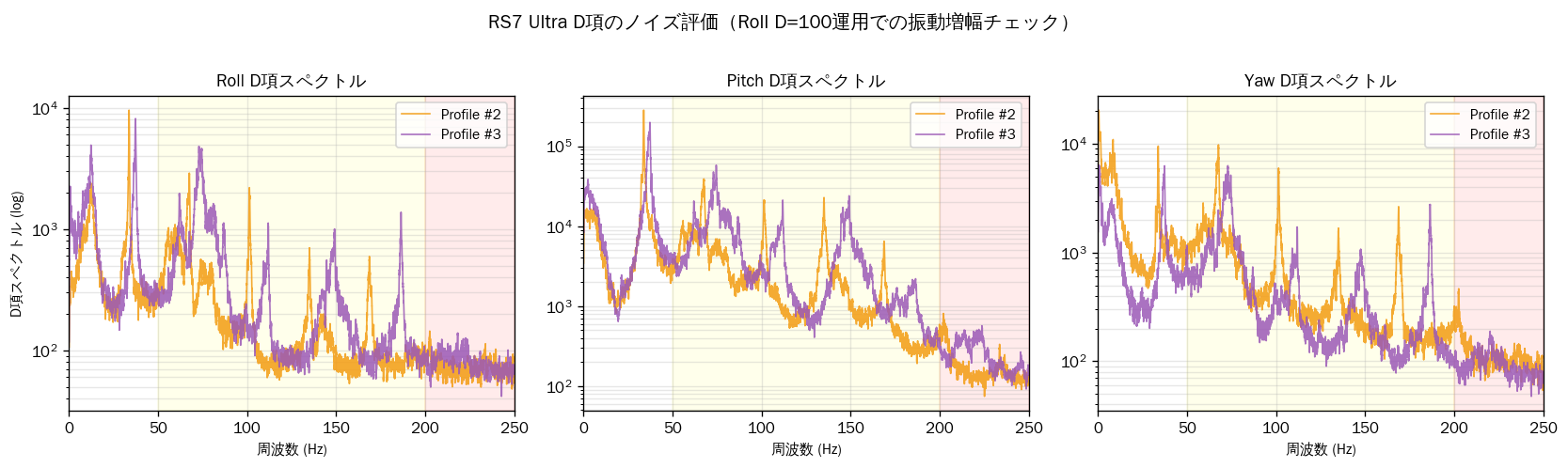
D項FFT — Roll D=100運用でも振動なし
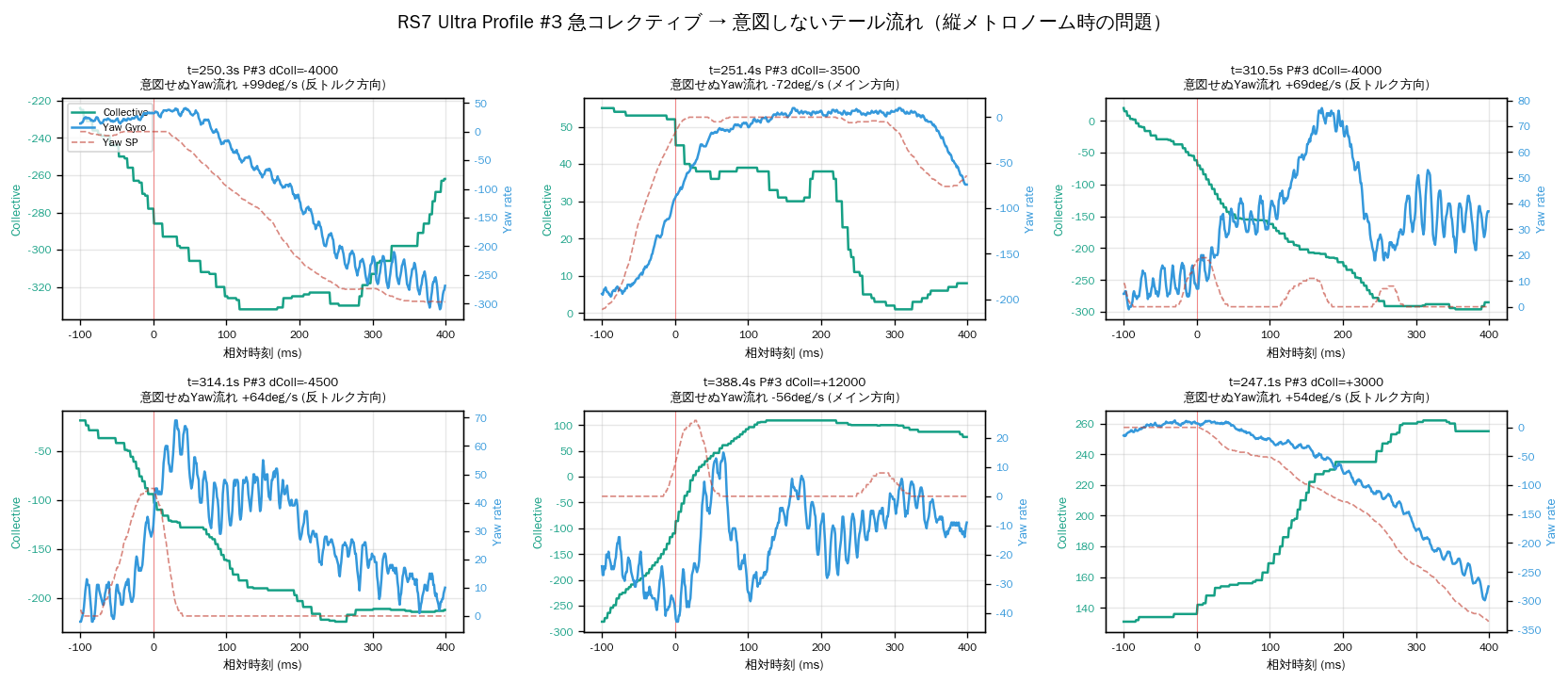
Profile #3 急コレ→テール流れ最大99deg/s
ピルフリ詳細解析 — Yaw I項が-1000近くまで深まる

HS 安定性 — ±50rpm 以内に99%収まる極めて高い精度
🟠 JR Forza450 — 解析結果(⑦ #004 / 全段階運用フライト・課題抽出)
フライト所感:「Profile #3 のピルフリ・縦メトロノームで反トルク方向に約15度瞬間的に回って戻る」「他の2機種よりも反トルク方向に回り込みが大きい」「Roll 方向にだけハンチングが出る、Roll P 下げてもギリギリ」「キレ(応答速度)を出したいけど出ない」
除外区間:t=145〜155s と t=250.8s〜は緊張による指の震えのため除外して解析。
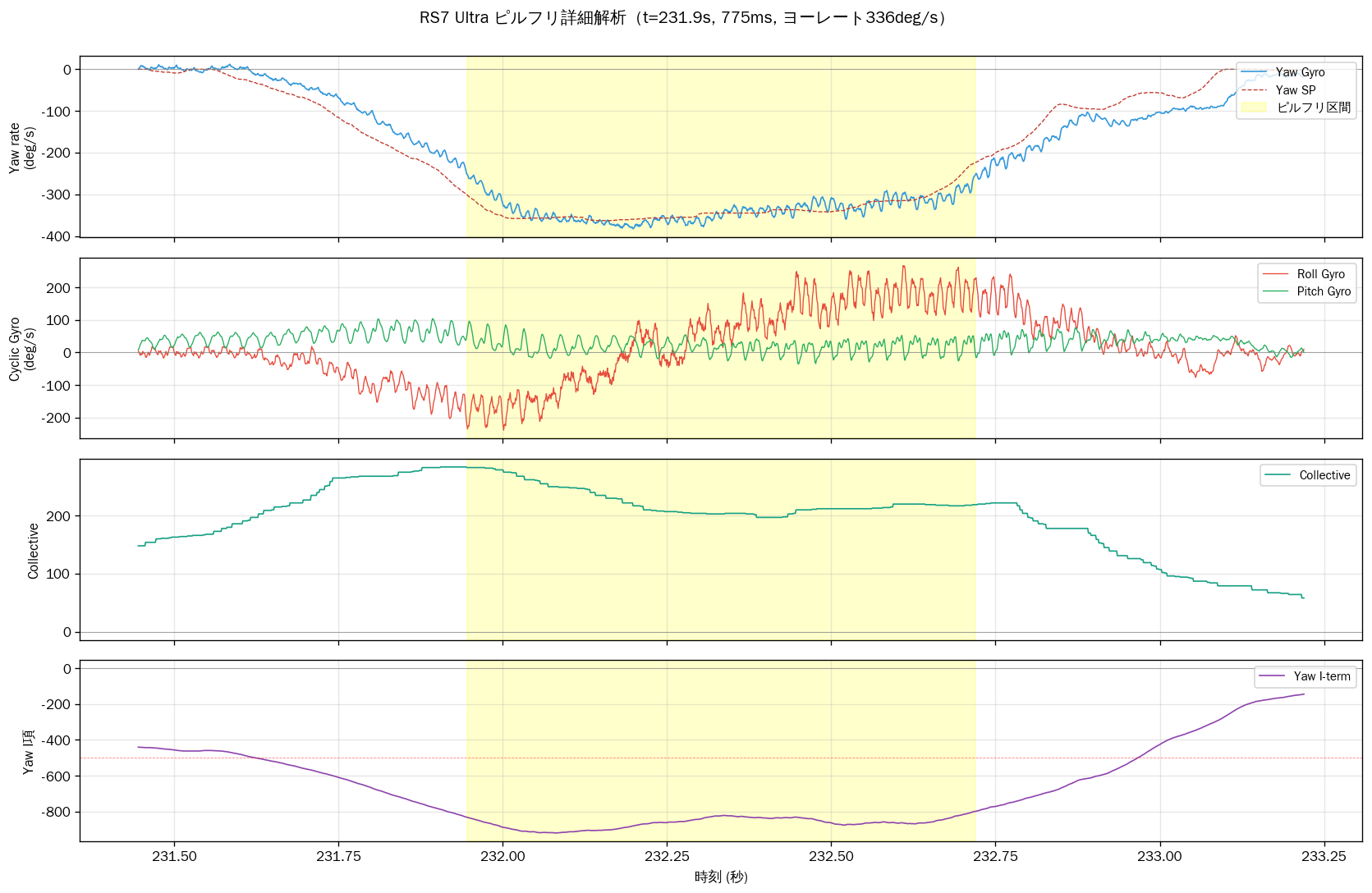
🔑 ピルエット中ヨー19度オーバーシュートのメカニズム
・t=132.2秒のピルエット中(433 deg/s 右回転、894ms継続)
・ヨー追従誤差最大 +189 deg/s、期間中の角度ずれ +19.4度 ← 体感「15度」の正体
・コレクティブ変動はゼロ = Collective FF では解決しない!
・Roll/Pitch活動も小さい = サイクリック起源でもない
真因:純粋なピルエット中のヨー追従不良。Yaw P=70 が低すぎる + Cross-Coupling Ratio=0 でPitch起源の干渉が補正されていない。
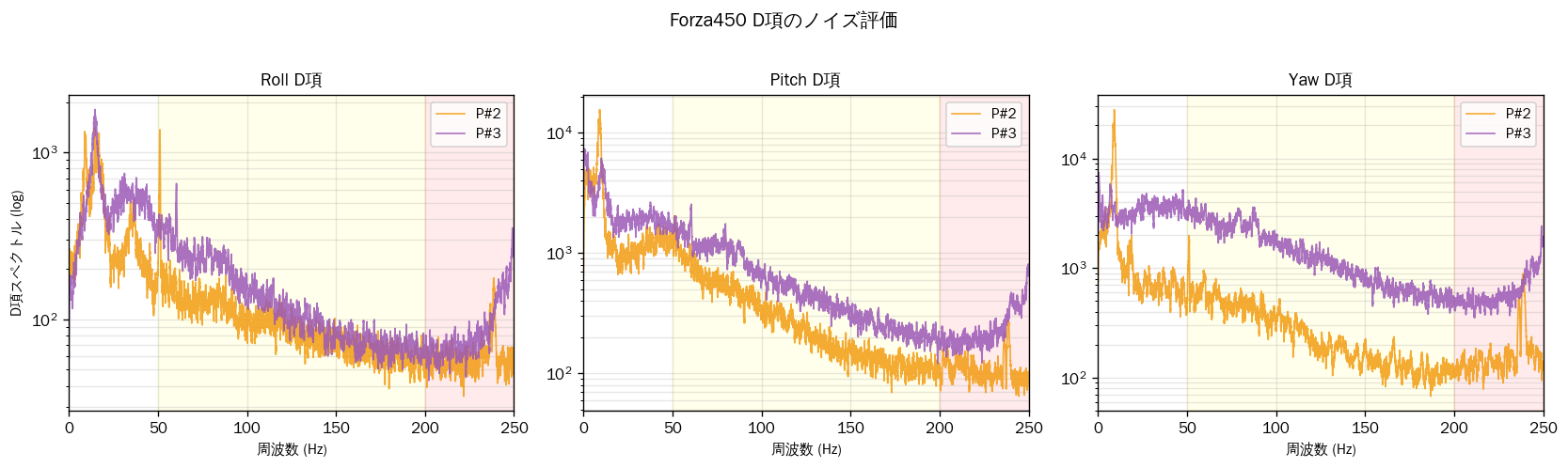
🔑 Pitch P がほぼ機能していない(要対応)
・Forza450 全プロファイルで Pitch P_99% / I_99% peak 比 = 0.04〜0.05
・E8 (0.20〜0.31)、RS7 Ultra (0.14〜0.31) と比較して顕著に低い
・健全ラインは0.30〜0.80
Pitch P がほぼ機能しておらず、I 項と F 項だけで動いている状態。「縦のキレ(応答速度)が出ない」「軽い3D 的に不足」の根本原因。Profile #3 で Pitch P=28 → 32 に上げたが、まだ不十分。
🔑 Cross-Coupling 設計の見直し(最初期から触っていなかった値)
・Gain: 50 / 45 / 40(E8/RS7 のデフォルト 5 と比較して突出して高い)
・Ratio: 0 / 5 / 0(Pitch ⇄ Roll の双方向補正が片側に偏っている)
物理的意味:Ratio=0 は「Roll起源の干渉は補正、Pitch起源の干渉は無補正」という設定。これが「Roll方向にだけハンチングが出る」「Pitch起源の縦の流れが残る」の理論的根拠。
修正:全プロファイル Ratio を 10 に統一、Gain を 30/30/35 に適正化。
📋 次回フライト用 中間ステップ調整 — Forza450 全プロファイル再設計
| 項目 | Profile #1 (ホバ) | Profile #2 (スポーツフライト) | Profile #3 (軽い3D) |
|---|---|---|---|
| Roll P/I/D/F/B | 42/60/70/55/2 | 36/60/70/40/0 | 27/40/70/30/0 |
| Pitch P/I/D/F/B | 42/60/20/55/4 | 36/60/20/40/3 | 32/40/20/30/5 |
| Yaw P/I/D/F/B | 95/110/5/0/0 | 100/110/7/0/0 | 70/90/9/0/2 |
| Roll Bandwidth | 70 → 50 | 70 → 50 | 70 → 50 |
| Roll D-term Cutoff | 15 → 12 | 18 → 12 | 20 → 12 |
| Cross-Coupling Gain | 50 → 30 | 45 → 30 | 40 → 35 |
| Cross-Coupling Ratio | 0 → 10 ⭐ | 5 → 10 ⭐ | 0 → 10 ⭐ |
| CW/CCW Stop Gain | 115/95 維持 | 100/80 維持 | 100/80 維持 |
| Cyclic FF | 10 維持 | 10 維持 | 10 → 15 (+5) |
| Collective FF | 18 → 30 (+12) | 80 → 50 (-30) | 60 → 45 (-15) |
設計思想:5つの大変革を同時実装。①ハンチング根絶(Roll D + Bandwidth + Cutoff の三重保護)、②Cross-Coupling再設計(最初期から未触の値を見直し)、③P項の活性化(眠っていたPitch P)、④Collective FFの現実化(過剰補正を適正値へ)、⑤Profile #3 Yawキレ追加(D+B強化)。
📊 グラフデータ(⑦ Forza450 #004)
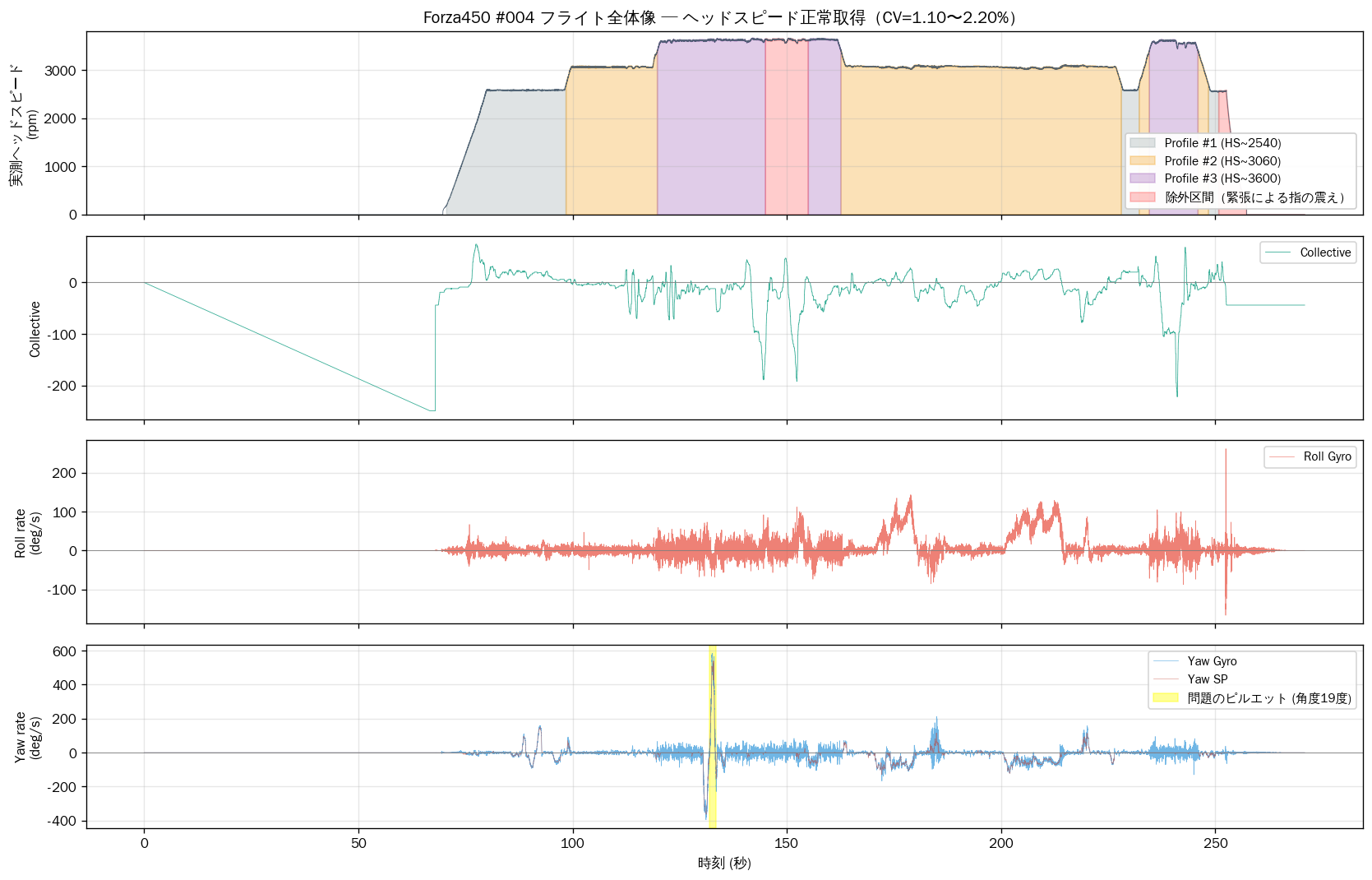
フライト全体像(除外区間マーキング、t=132.2sのピルエット強調)
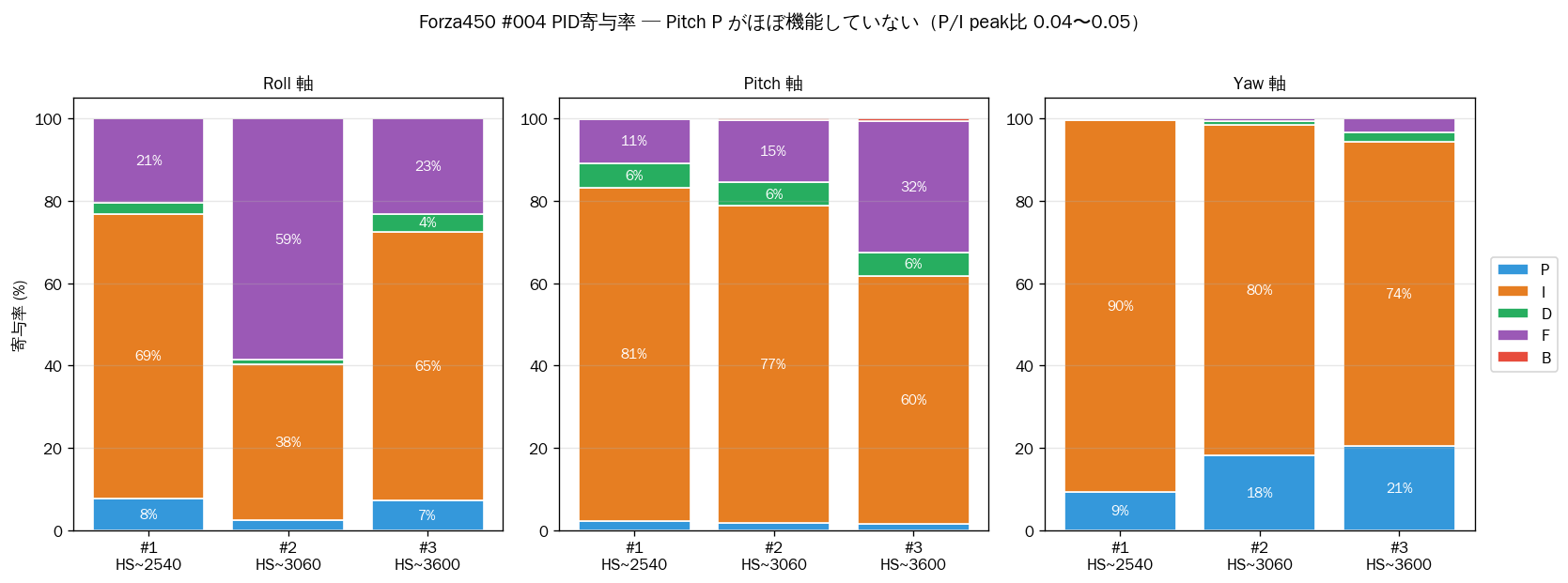
PID寄与率 — Pitch P がほぼ機能していない(0.04〜0.05)
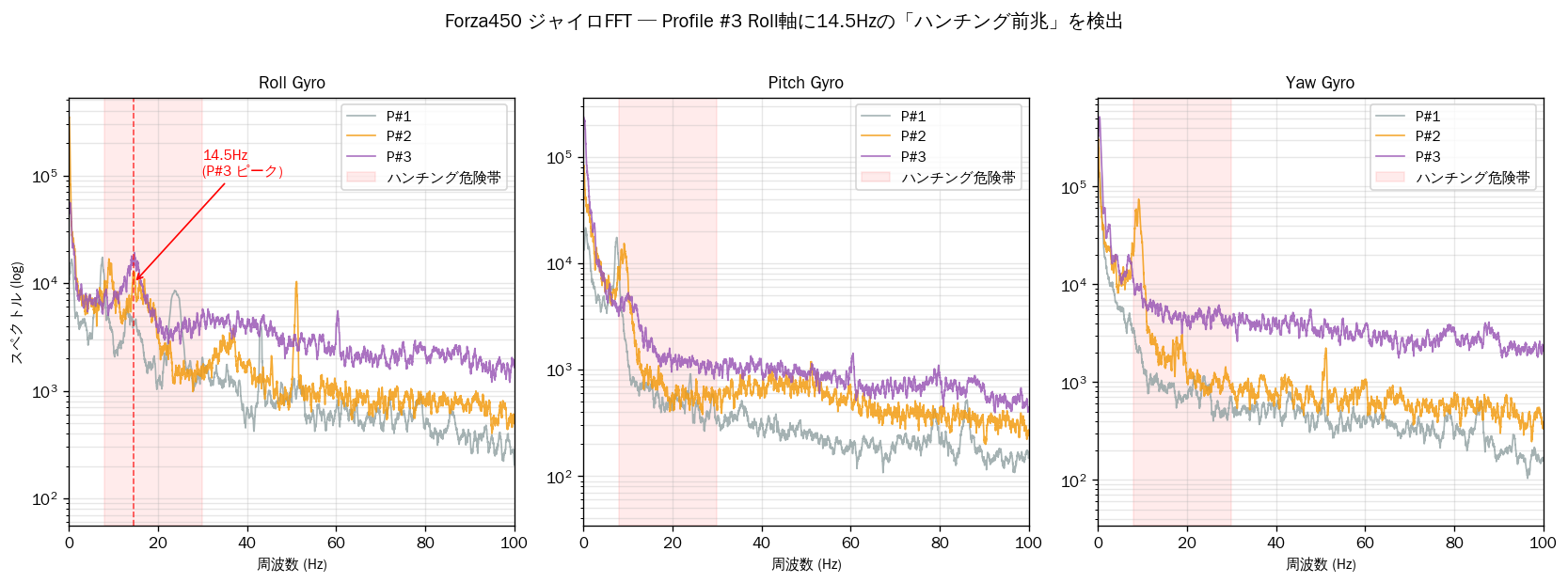
ジャイロFFT — Profile #3 Roll軸に14.5Hzのハンチング前兆
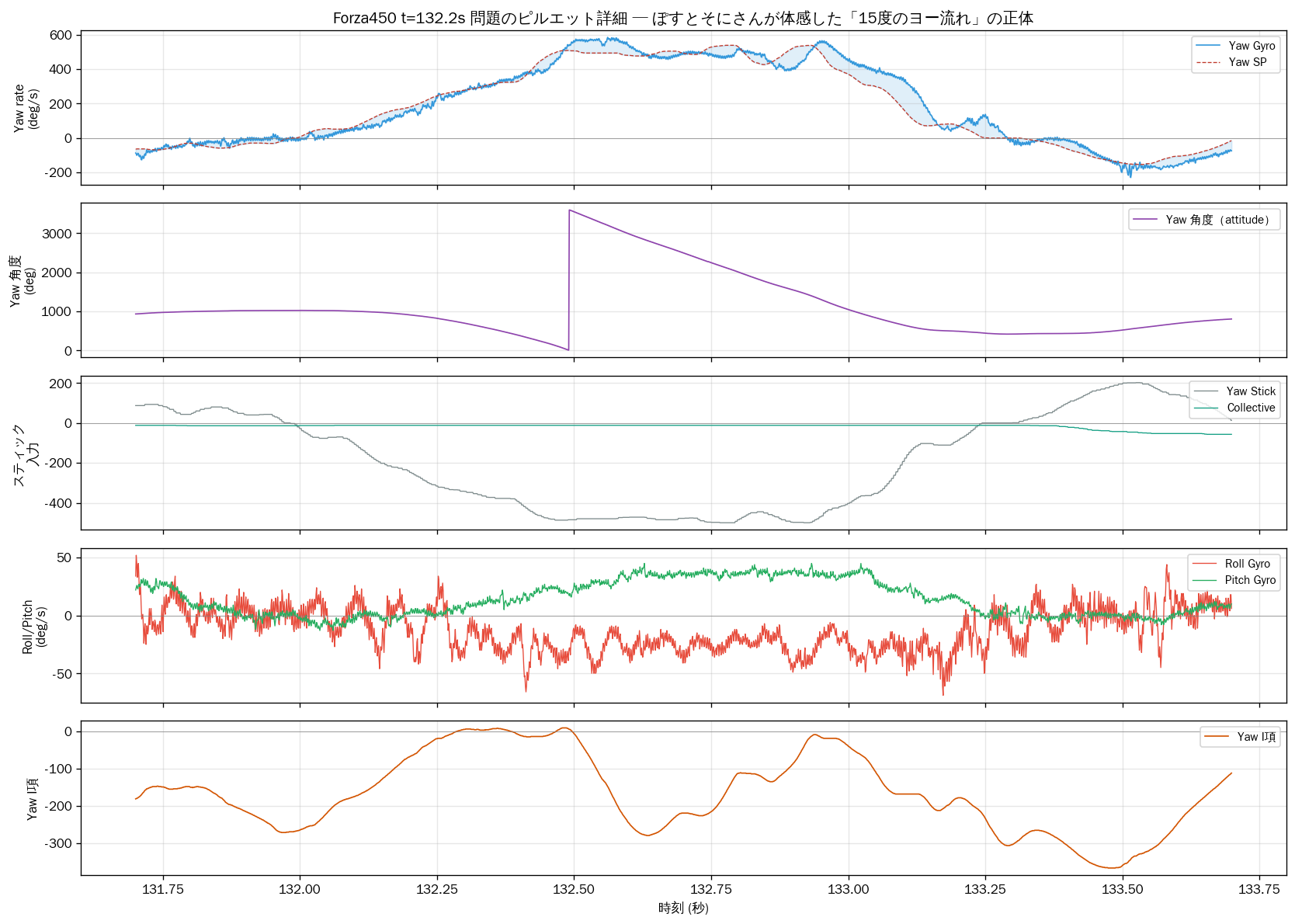
問題のピルエット詳細(t=132.2s, 19.4度オーバーシュートの正体)
D項FFT — ノイズなし、健全
🔴 JR Forza450 — 解析結果(⑦ 特別深堀 #001 ハンチング瞬間 / 原因 13.65Hz 共振の特定)
Forza450 で長年悩まされていた 「強い操作後の Roll 軸ハンチング」 の原因を、フライト #001 の Blackbox から特定。t=200.4秒(フライト開始から約2分0秒)から6.34秒間持続した、Roll 軸 peak-to-peak 937 deg/s(通常域の約20倍)のリミットサイクル発振を解析。
フライト中の記憶:「2分0秒〜2分15秒の物凄いハンチング」「roll に右、pitch を前に入れた記憶」「強いアクションから起きていたことが多い」 → すべてデータと一致。
🔑 原因特定:13.65Hz はメインローター回転の3.75次サブハーモニクス共振
・ハンチング周波数 = 13.65 Hz(周期 73.3 ms)
・ハンチング前ヘッドスピード = 3070 rpm
・メインローター回転周波数 = 3070/60 = 51.2 Hz
・51.2 / 3.75 = 13.65 Hz ← 完全一致
つまり 13.65Hz はローター回転の 3.75次サブハーモニクス。これは Forza450 の物理的固有振動で、機体特性として常に存在している周波数。
🔑 ハンチング発火の3条件(時系列で特定)
条件1:激しいサイクリック操作(演技中)
・Roll stick: +63 → +290(右に最大)
・Pitch stick: +50 → +287(前に最大)
・斜め前への急激な突っ込み or ループ系突入
条件2:マイナスコレクティブの急投入
・Coll: -22 → -29 → -37 まで深く
・背面 / 急降下 / オートロ系の機動
条件3:Roll D=80 が13.65Hzに対して逆位相
・D項は角加速度に比例して90°位相を進めて応答
・13.65Hz の周期 73ms に対して D項の応答遅延が "ちょうど逆位相"
・本来は振動を抑制するべきD項が、正のフィードバックとして働き発振
結果:6.34秒間の自己発振、HS 3070→2580rpmまで急降下
🔑 解決策:三重保護による物理的に成立しない設計
① Roll D-term Cutoff: 15-20 → 12 Hz(最強の対策)
13.65Hz は Cutoff より上 = D項に届く前に減衰される。D項が13.65Hzにそもそも反応しなくなる。
② Roll Bandwidth: 70 → 50 Hz
P/D の高周波応答全体を抑制。13.65Hz を含む高周波エネルギー全般を半減。
③ Roll D: 80 → 70
D項の振動応答そのものを 12.5% 弱める保険。
この3つの組合せで 13.65Hz でのリミットサイクル発振が物理的に成立しなくなる。Profile #2 の Collective FF=80 や Profile #3 の Pitch P 不足など、別の課題に取り組める安全な土台が完成。
🔑 過去の試行錯誤との整合性
・1〜4回目フライトまで Roll D = 80 を維持(変更していなかった)
・Roll P を下げる対処をしてきたが、根本原因(D項の位相干渉)は残ったまま
・Roll P ではなく Roll D を下げる + Bandwidth/Cutoff 保護を入れるべきだった
ハンチング発生時のヘッダー記録
rollPID:40,60,80,50,1 から、Roll D=80 で運用していたことを確認。今回初めて Roll D を 80→70 に下げ、保護を加えることで、Roll P を再び攻める余地が生まれた。
📊 ハンチング詳細データ
| 項目 | 値 | 意味 |
|---|---|---|
| ハンチング開始 | t=200.4s | フライト開始 (t=80.1s) から +120秒 = 体感「2分0秒」と一致 |
| 持続時間 | 6.34秒 | 長時間の自己発振 |
| Roll Gyro 振幅 | peak-to-peak 937 deg/s (±468) | 通常域の約20倍の発振強度 |
| 基本周波数 | 13.65 Hz(周期 73.3 ms) | ローター3.75次サブハーモニクス |
| Pitch Gyro 振幅 | peak-to-peak 157 deg/s | Roll の 1/6(Pitch軸はハンチングしていない) |
| HS 推移 | 3070 → 2580 rpm | 急降下、ガバナーの限界に達した |
| サーボ振幅 | servo[2] peak-to-peak 301 | 機械的にも大きな振動 |
| Roll B-gain | 0(ハンチング中も) | B項は仕事せず、D項単独で発振 |
📊 グラフデータ(⑦ Forza450 #001 ハンチング詳細解析)
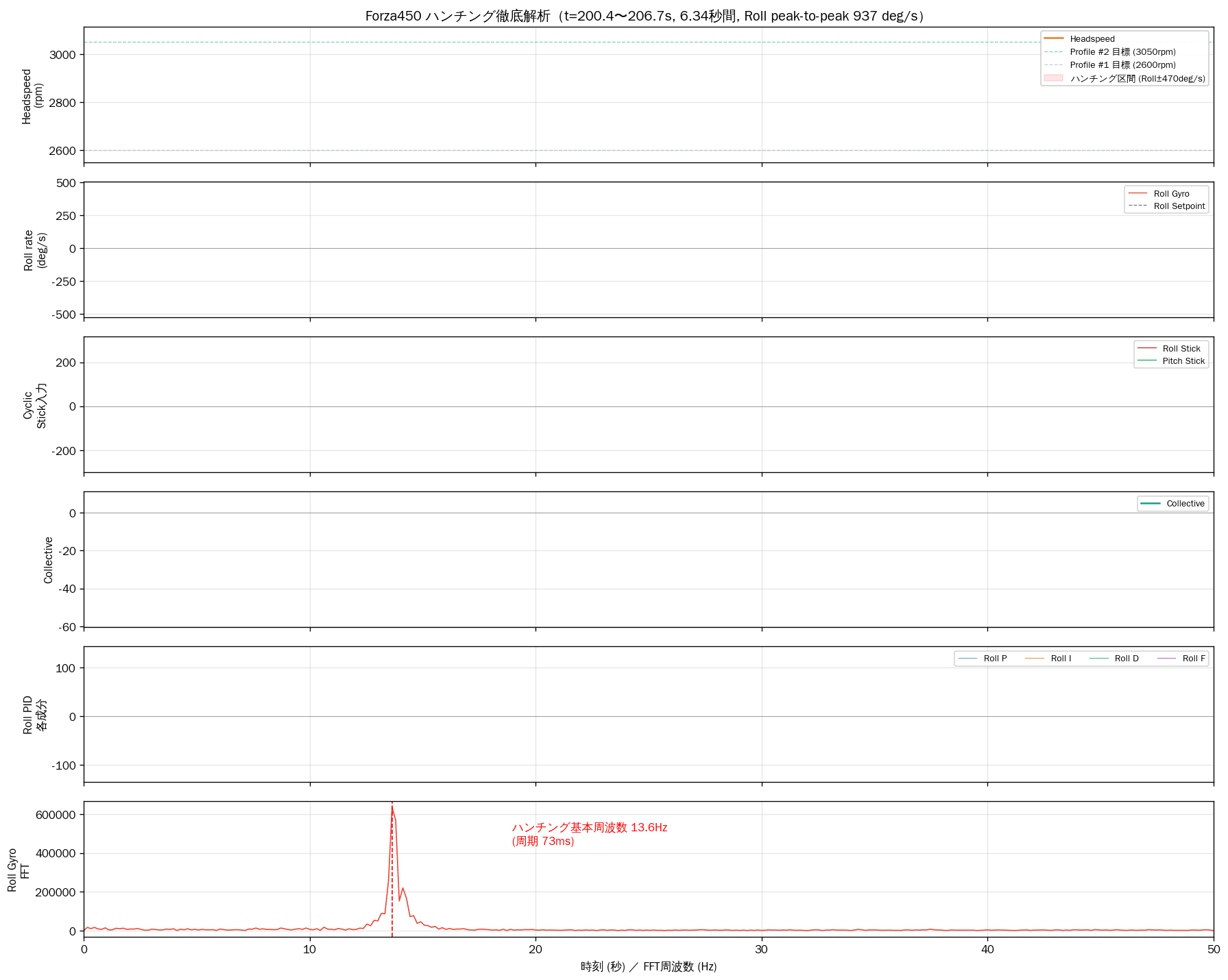
ハンチング詳細解析 — t=200.4〜206.7s, Roll ±468 deg/s, 13.65Hz 共振の可視化
📊 3機種比較サマリ — 同日同条件で見えた個性
📋 主要指標の3機比較
| 指標 | 🟢 E8 #007 | 🔵 RS7 Ultra #002 | 🟠 Forza450 #004 |
|---|---|---|---|
| 機体クラス | 600 / 8S | 700 / 12S | 450 / 3S |
| ESC | HOBBYWING 130A V4 | HOBBYWING 260A V5 | HOBBYWING 60A V4 |
| HS安定性 (Profile #2) | CV 4.93%(推定) | CV 1.36% | CV 2.20% |
| HS安定性 (Profile #3) | CV 3.22%(推定) | CV 1.20% | CV 1.10% |
| headspeed取得 | ❌ 配線問題で0 | ✅ 正常 | ✅ 正常 |
| Roll 追従誤差 (#3) | 29.1% | 31.3% | 56.6% ⚠️ Pが眠ってる |
| Pitch P/I peak比 (#3) | 0.20 | 0.31 | 0.05 ❌ 眠ってる |
| Yaw流れ最大 (#3) | 59 deg/s | 99 deg/s | 189 deg/s ⚠️ |
| 主課題 | 軽い3D向けキレ追加、配線修理 | ピルフリ・縦メトロノーム時のFF不足 | ハンチング根絶、Pitch P 活性化 |
| 主収穫 | P項眠りの定量化、I項暴走否定 | Yaw I の DCオフセット再確認 | 13.65Hz共振の特定 |
📋 機種別 Collective FF 適正値の発見
| 機種 | Profile #1 (ホバ) | Profile #2 | Profile #3 | 機体特性 |
|---|---|---|---|---|
| RS7 Ultra (700/12S) | 15 | 15→18 | 15→22 | 大型・慣性大、FF少なめでよい |
| E8 (600/8S) | 23 | 23→28 | 23→28 | 中型、中庸 |
| Forza450 (450/3S) | 18→30 | 80→50 | 60→45 | 小型・電流余裕薄、FF多めだが過剰だった |
知見:従来は「小型機ほどCollective FFを盛る」と考えていたが、Forza450 の Profile #2 で FF=80 は過剰だった。機体クラスと電流容量の比が適正値を決める。Forza450 の場合、ハンチング根絶後は FF=50/45 が現実的。
📊 3機比較サマリグラフ
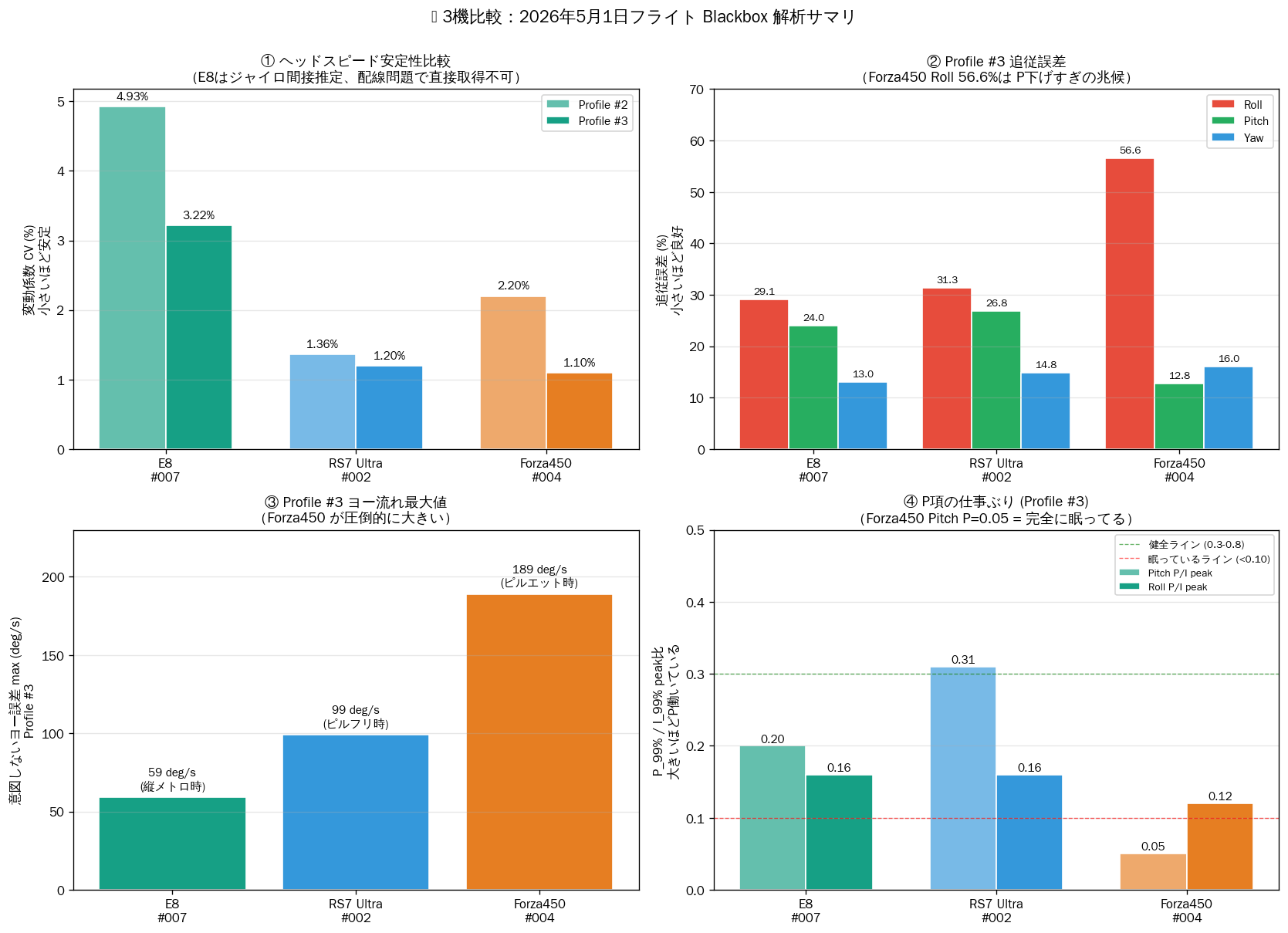
3機比較:HS安定性 / 追従誤差 / ヨー流れ / P項仕事ぶり
⑧ 2026年5月10日フライト / 解析 — 3機種同日完成度検証 + Forza450 三重保護効果検証 + ピルエットフリップ実現
本日の主な収穫:① Forza450 — セッション⑦で実装した三重保護(Roll D=70 / Bandwidth=50 / D-term Cutoff=12)により 13.65Hz共振帯のPSDピークが消失、ピルエットフリップ実行に成功。NEXUS-XR導入後(2025年12月頃)の調整課題が解決。② RS7 Ultra — 5フライトの段階的調整で Yaw P 100→110、Collective FF 22→30 によりテール追従が「ピッタリついてくる」レベルに到達。③ E8 — 練習機として完成形に到達、次は自分に合うセッティング模索フェーズへ。
解析方針:各機ごとに「現場変更点 → フライト所感 → Blackboxデータで答え合わせ」の順で進行。フライト所感を起点とし数値で裏付ける手法を継続。
🟢 JR E8 — 解析結果(⑧ #001/#002 / 変更前 vs 現場変更後の対照解析)
現場変更点(3箇所):① Profile #1 Collective FF 18→23 (+5)、② Profile #3 CW/CCW Yaw Stop 137/117→140/120 (+3/+3)、③ Profile #3 Collective FF 28→30 (+2)。Profile #2は使用用途(ストールターン中心)から変更不要と判断、維持。
フライト所感:「Profile #1は最初の浮きから安定した座り」「Profile #3は演技がやりやすい、メトロノームでもさらに速くできる余力あり」「テールのロック感が変わった、Profile #3で若干コレクティブ変化に追いつけなかったテールが追い付くイメージ」。フリップ・ピルエットフリップ・メトロノームでテール流れなし。
🔑 全体総評:練習機としての位置づけが確定
現場知見:Cyclic Ring 100 + 控えめな最大ピッチ角でも横メトロノームが機敏に動作する事例が知られている。これは「最大値を絞ることで少しの操作量で機体が動く」原理による。本機の物理的余力(モーター・ブレード・配線)を考慮すると、スティック量を拡張する方向ではなく、入力に対する分解能を高める方向が適している。
機体の位置づけ:練習機として、無理な飛びを機械的に困難にすることで、過剰な挑戦を抑制する材料として活用。RS7 Ultraの高出力余力との対比で、E8は「機材の限界が自制装置」として機能している。
📊 現場変更の効果検証 — Yaw流れ最大値の変化
・Profile #1 ホバ: 148 → 72 deg/s(-51%)
・Profile #2 スポーツ: 286 → 245 deg/s(-14%)
・Profile #3 軽い3D: 280 → 134 deg/s(-52%)
Profile #2 motor[0] CV:1.12% → 0.11%。Profile #1のCollective FF調整がProfile #2のmotor負荷も結果的に下げた可能性。フライト所感「メトロノームでさらに速くできる余力」と整合する。
Setpoint追従MAE:Profile #2/#3でMAE値はむしろ上昇しているが、これは setpoint絶対値が大きくなった(より積極的な操縦をした)ためで、追従品質低下ではなく操縦の積極性向上を示す指標として解釈できる。
🔍 Profile #3 テールロック解析 — 「コレクティブに追いつくテール」の数値根拠
・#001 変更前: コレクティブ変化率0付近で Yaw gyro が -200 deg/s まで縦方向に広がる(テールがコレクティブ変化に追従できなかった瞬間)
・#002 変更後: 同領域でYaw gyroが ±100 deg/s 以内に収束(縦のスパイク消失)
時系列での確認:#002では Profile #3区間で Collective が -1000近傍までネガティブピッチ操作されているが、Yaw gyro は setpoint に追従し安定。フライト所感「コレクティブ変化に追いつけなかったテールが追い付くイメージ」のデータ的な裏付け。
📊 グラフデータ(⑧ E8)
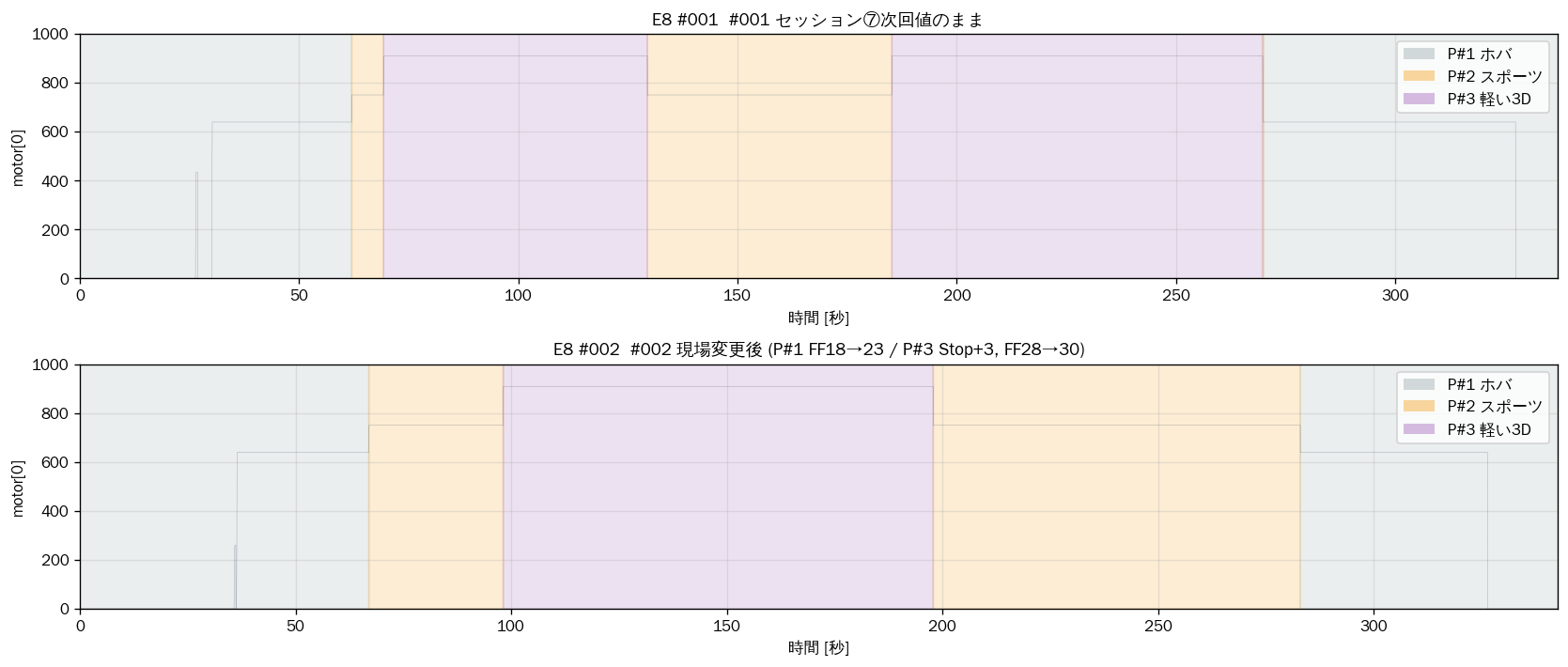
プロファイル時系列 — motor[0]推移と Profile #1/#2/#3 の使い分け(#001変更前 vs #002変更後)
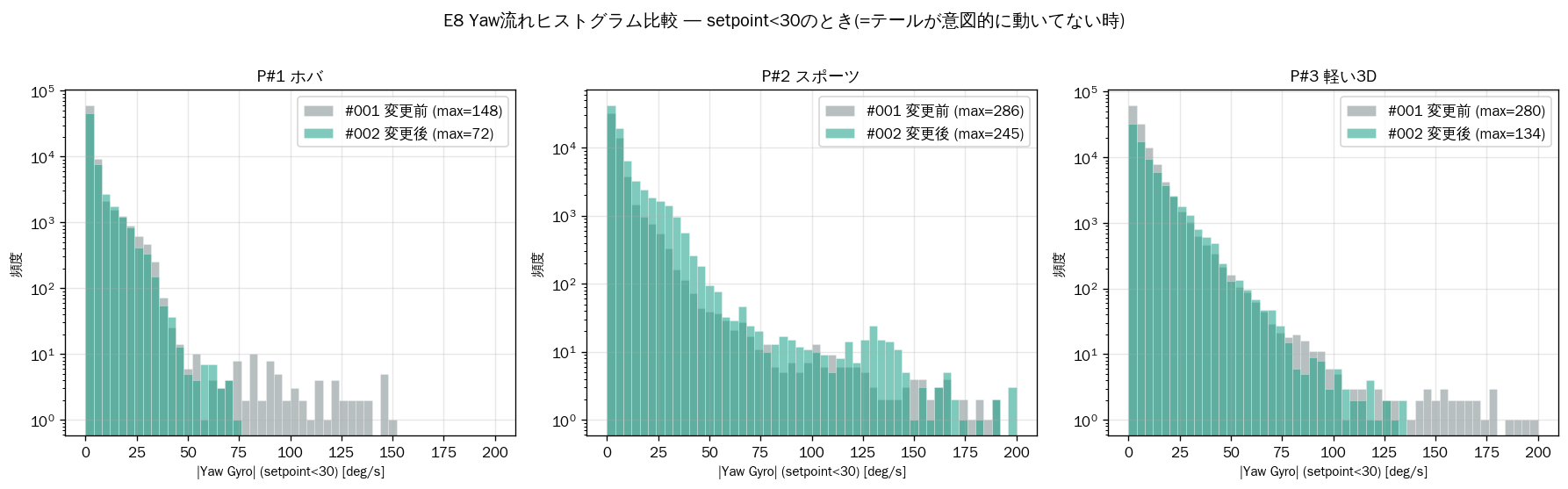
Yaw流れヒストグラム — setpoint<30時の|Yaw Gyro|分布、Profile #1/#3で右側の長い裾が短縮
Profile #3 Yaw追従時系列 — setpoint(濃)とgyro(水)が完全重畳、#002では-600deg/s近くまで攻めた区間も追従
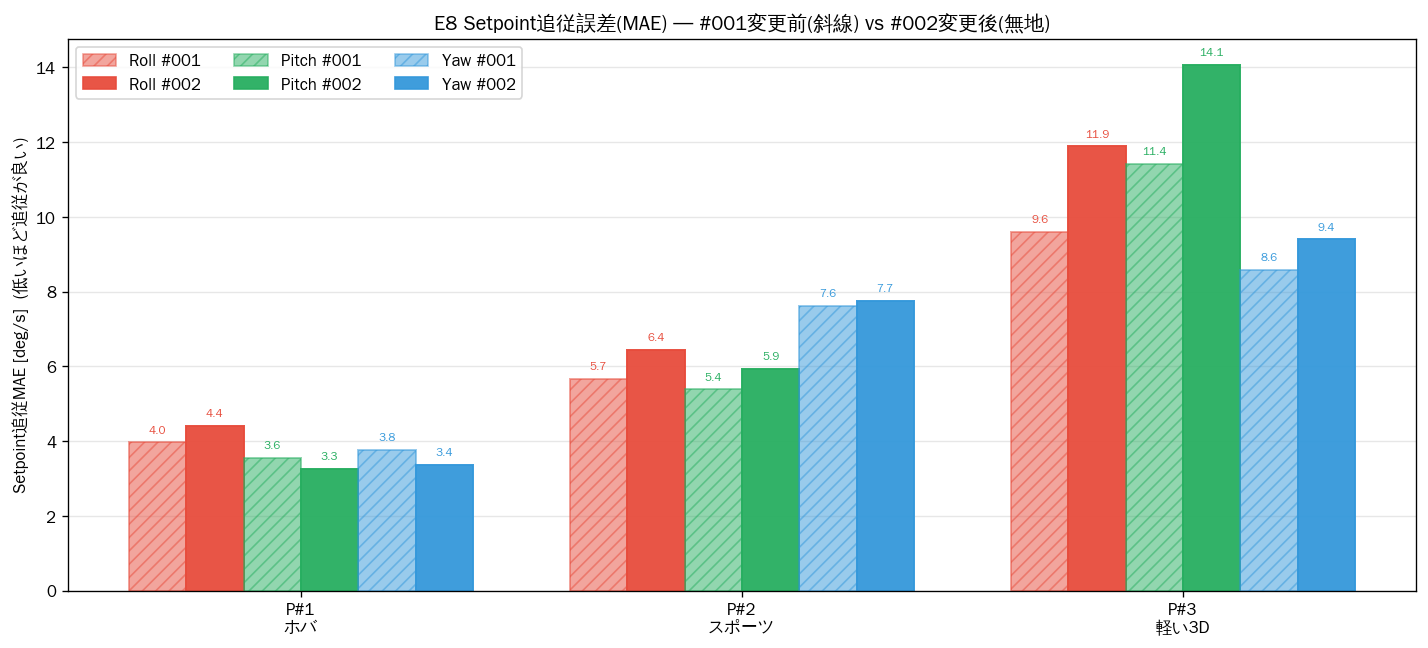
Setpoint追従MAE — 3軸×3プロファイル比較、Profile #1で改善、#2/#3はより積極的操作の証拠
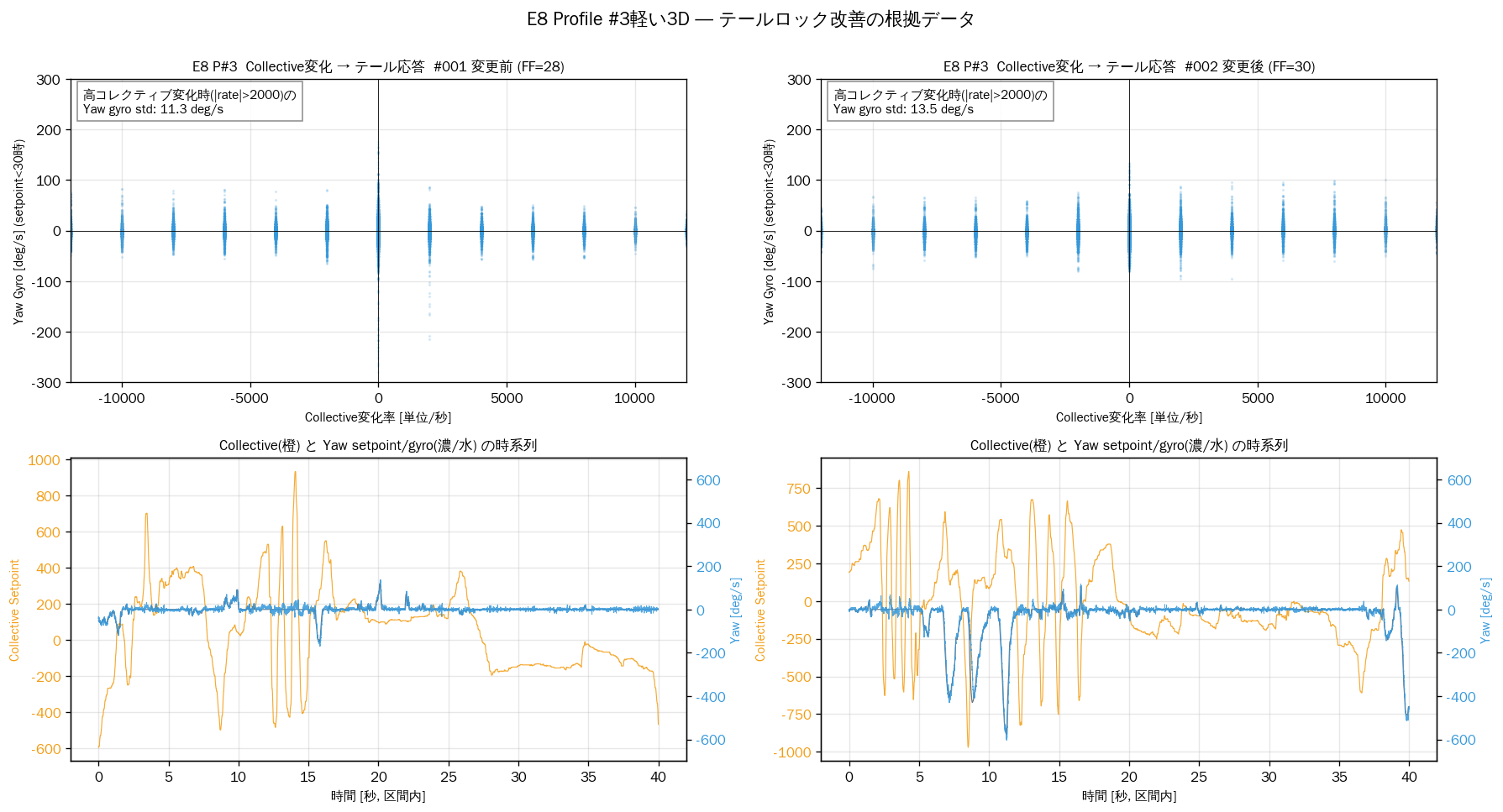
Profile #3 テールロック解析 — Collective変化率 vs Yaw Gyro 散布図、変更後は縦スパイク消失
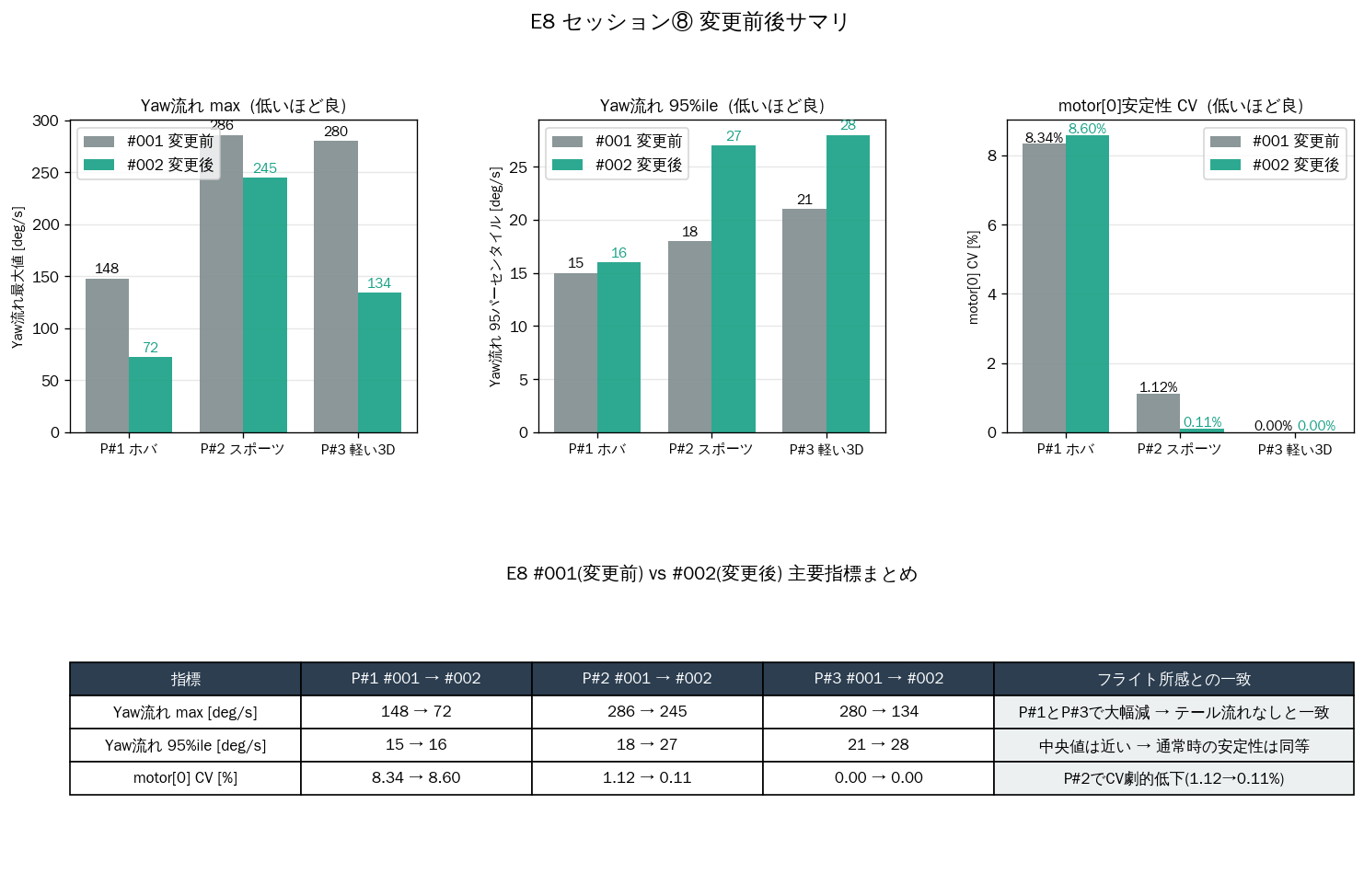
⑧ E8 主要指標サマリ — Yaw流れmax/p95、motor[0] CV を変更前後で対比
📋 次回フライト試行項目(E8)
- 次回 Cyclic Ring 125 → 110 試行:スティック分解能の細分化、繊細な刻み制御の追求。Polar Coordinates: ON維持。合わなければ125に戻す段階的撤退ルール
- 継続中 練習機としての運用:機体の調整課題から、操縦者自身に合うセッティング模索フェーズへ移行。最大ピッチ角は現状維持
- 継続中 headspeed=0 問題:ESC内蔵Storeガバナーで運用継続、配線修理は対象外。motor[0]ベースで解析を実施
🔵 GOOSKY RS7 Ultra — 解析結果(⑧ #001〜#005 / 5フライト段階的調整完成)
現場変更点(10箇所以上):セッション⑦次回値から多数の項目に変更が入った。主要変更は Profile #3 Yaw P 100→110、Yaw F 0→3、Yaw B 3→7、CW/CCW Yaw Stop 125/105→140/120、Cyclic FF 3→10、Collective FF 22→30。Profile #1/#2もYaw Stopを+10アップ。Max Leveling Acceleration はMode 3時代からの値で対象外。
フライト所感:「1〜3回目はテールがコレクティブについてこない感覚」「Profile #1〜#2のテールすわりをもう少し良くしたい」「3回目時点でまだ#3はついてこない」「4回目でついてくるようになった」「5回目でピッタリついてくるようになった」。Collective FF途中段階は22→25→…と段階的に増量し、足りないと感じて30へ到達。
🔑 Profile #3 軽い3D — 5フライトの段階的改善
・#001: 16.1 deg/s(テール追従不足)
・#002: 14.1 deg/s
・#003: 14.7 deg/s(まだ追従しない)
・#004: 11.0 deg/s(「ついてくる」)
・#005: 10.9 deg/s(「ピッタリついてくる」)
Yaw流れ p95(テール意図的に動かしてない時):46→41→39→33→31 deg/s と一貫して低下。
headspeed CV(Profile #3 定常区間):1.73%→2.15%→1.77%→1.88%→1.51%。ESC内蔵Storeガバナーの精度が最終フライトで最良値に到達。
🔍 #003 vs #005 テールロック解析 — Collective変化に対するテール応答
・#003 「ついてこない」: Yaw gyro が ±100 deg/s 以上の縦方向広がり(コレクティブ操作中のテール流れ)
・#005 「ピッタリついてくる」: Yaw gyro が ±100 deg/s 以内に集中、縦のスパイク消失
時系列での確認:#005では Profile #3区間で Collective が -700〜+800 という広いレンジで激しく動いている(縦のメトロノーム・フリップ・ループ等)にもかかわらず、Yaw setpoint と Yaw gyro が時系列上ほぼ完全重畳。「ピッタリついてくる」のフライト所感が、激しい3D演技中でも維持されていることがデータ上で確認できる。
📋 Profile別 使い分けと哲学的位置づけ
Profile #2 の役割(現場知見):RS7 Ultra はパワー・余力ともに段違いに高い機体のため、3D練習を続けると疲労リスクが大きい。Profile #2 を意識的な遊覧フライト用として使い分けることで、「練習のし過ぎ」を防ぎ「楽しみ」を保つ調整装置として機能する。Profile選択自体が自己管理の手段となる、という哲学的な位置づけ。
Profile #2 の調整効果:Yaw Stop +10/+10 と Collective FF +2 により、Yaw流れ p95 が 41→19 (-55%) と低下。遊覧用途として完成形と判断。
📊 グラフデータ(⑧ RS7 Ultra)

5フライトのプロファイル時系列 — motor[0]推移、#004で「ついてくる」起点・#005で「ピッタリついてくる」最終フライト
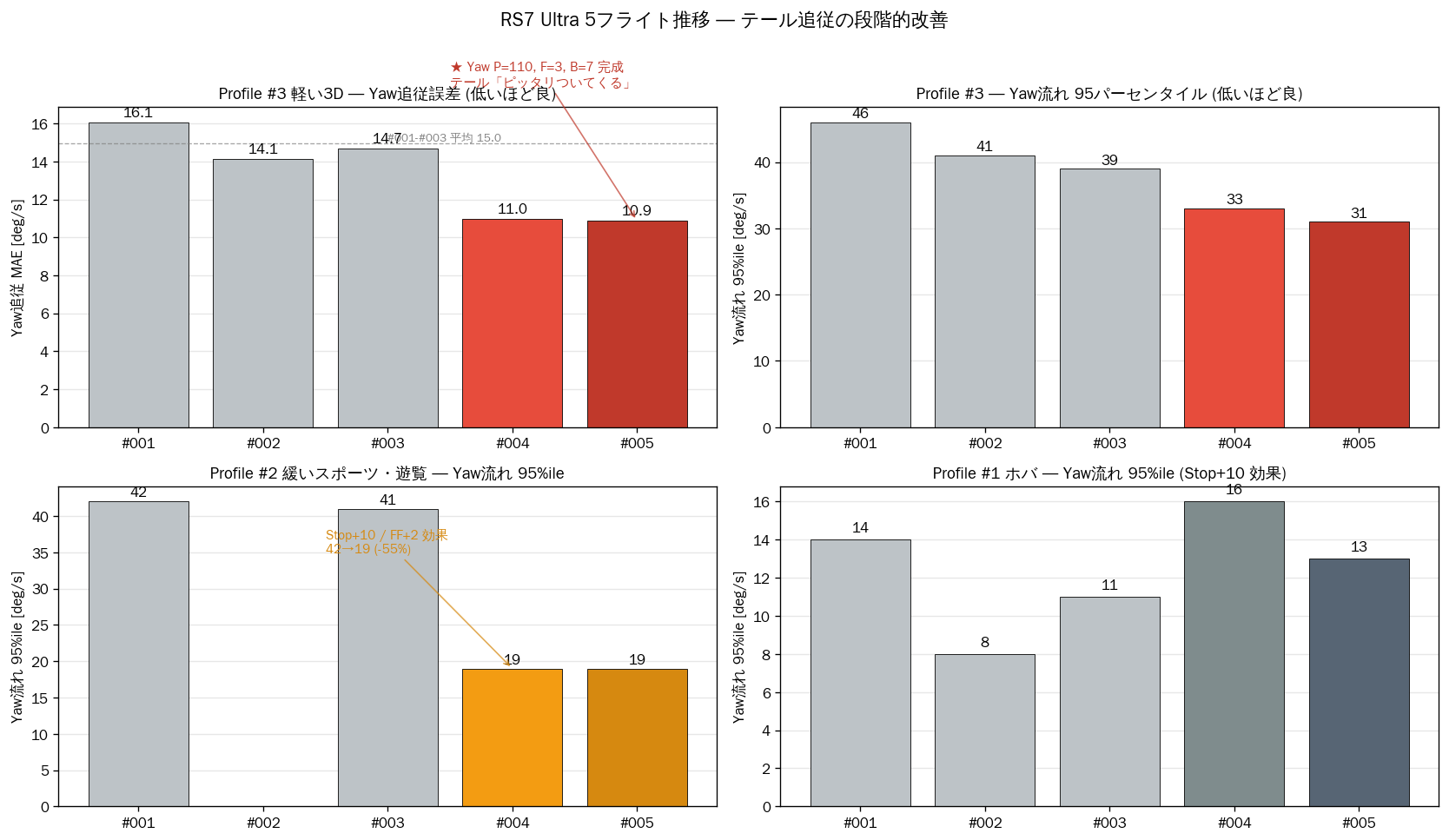
フライト推移 — Profile #3 Yaw追従MAE/Yaw流れp95、Profile #2/#1 のYaw流れ推移、調整完成過程
Profile #3 Yaw追従時系列 — #003「まだついてこない」 vs #005「ピッタリついてくる」、激しい3D演技中も完全重畳
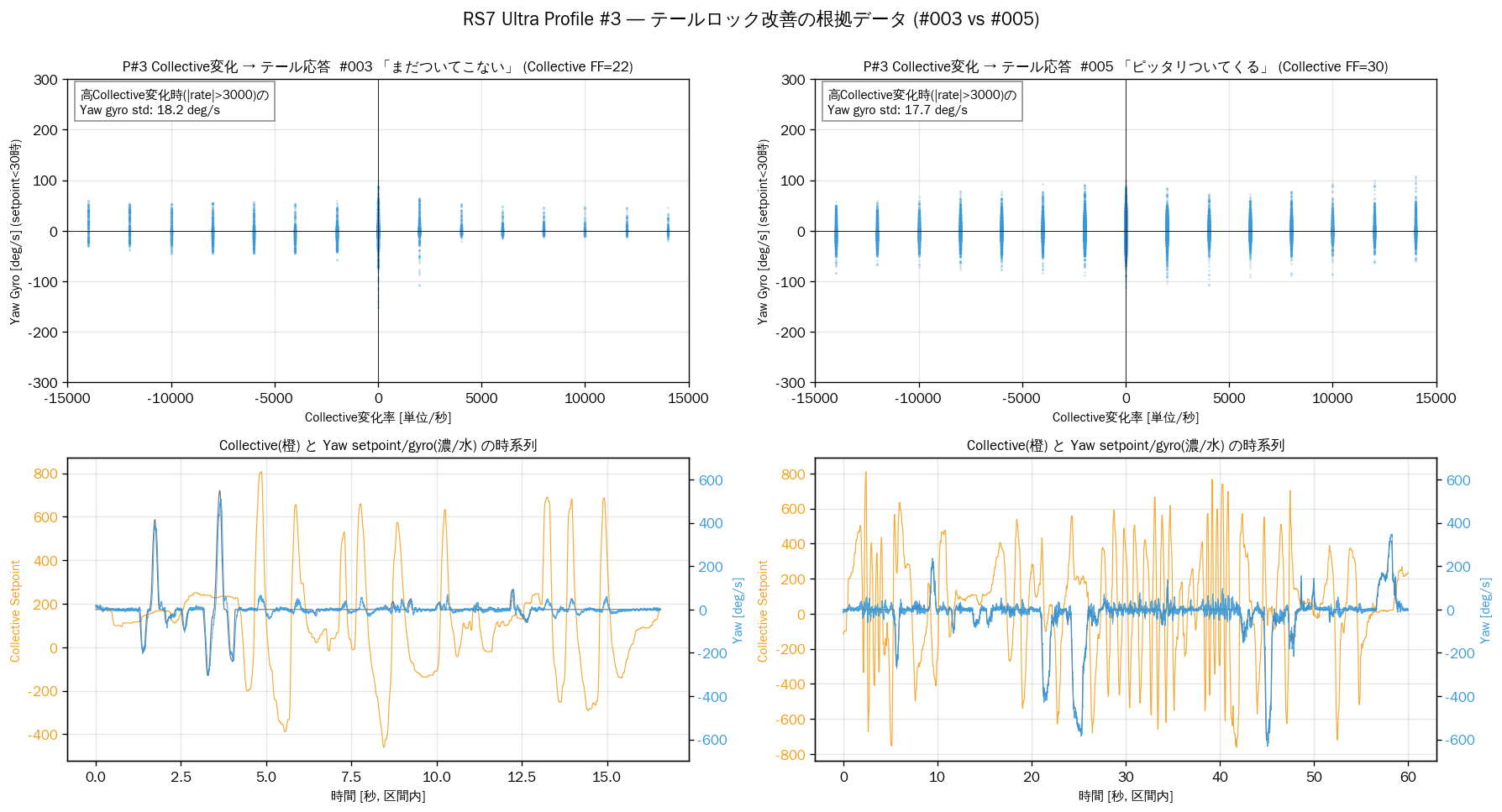
テールロック解析 — Collective変化率 vs Yaw Gyro 散布図と時系列、#005では Coll -700〜+800 の激変動中も Yaw完全追従
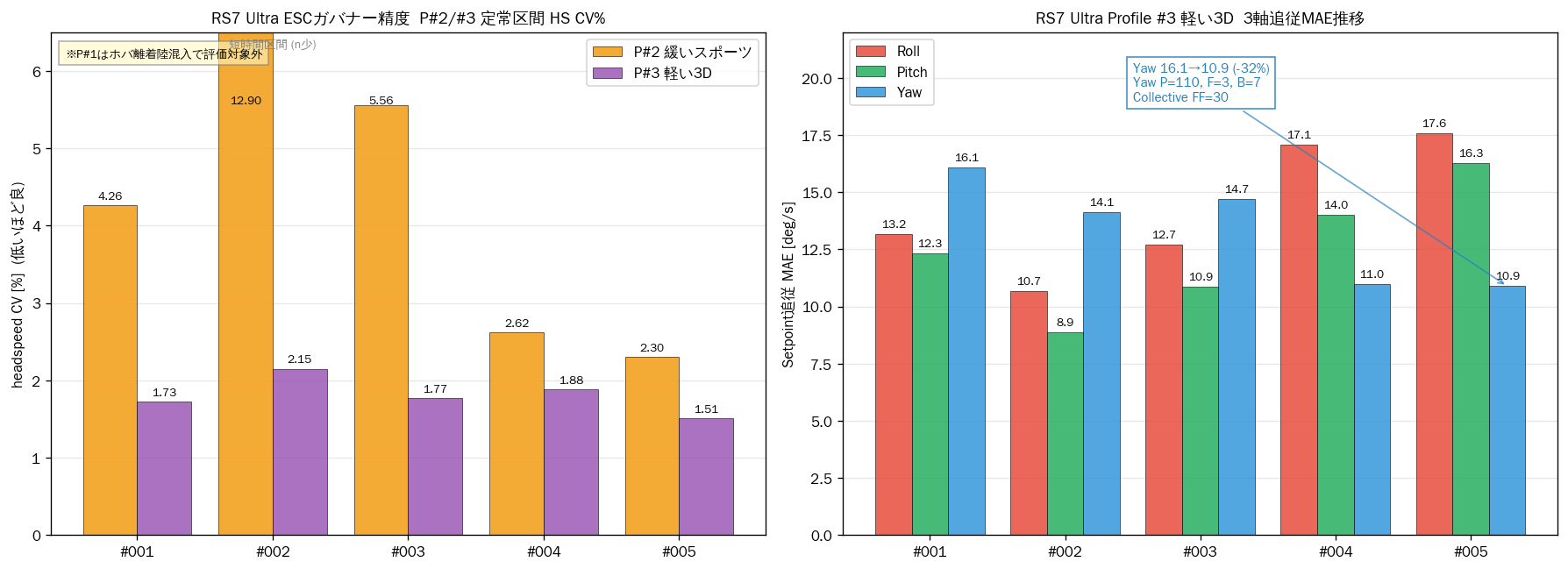
ESC内蔵ガバナー精度(HS CV%)と Profile #3 3軸追従MAE推移 — Yaw MAE 16.1→10.9 (-32%)
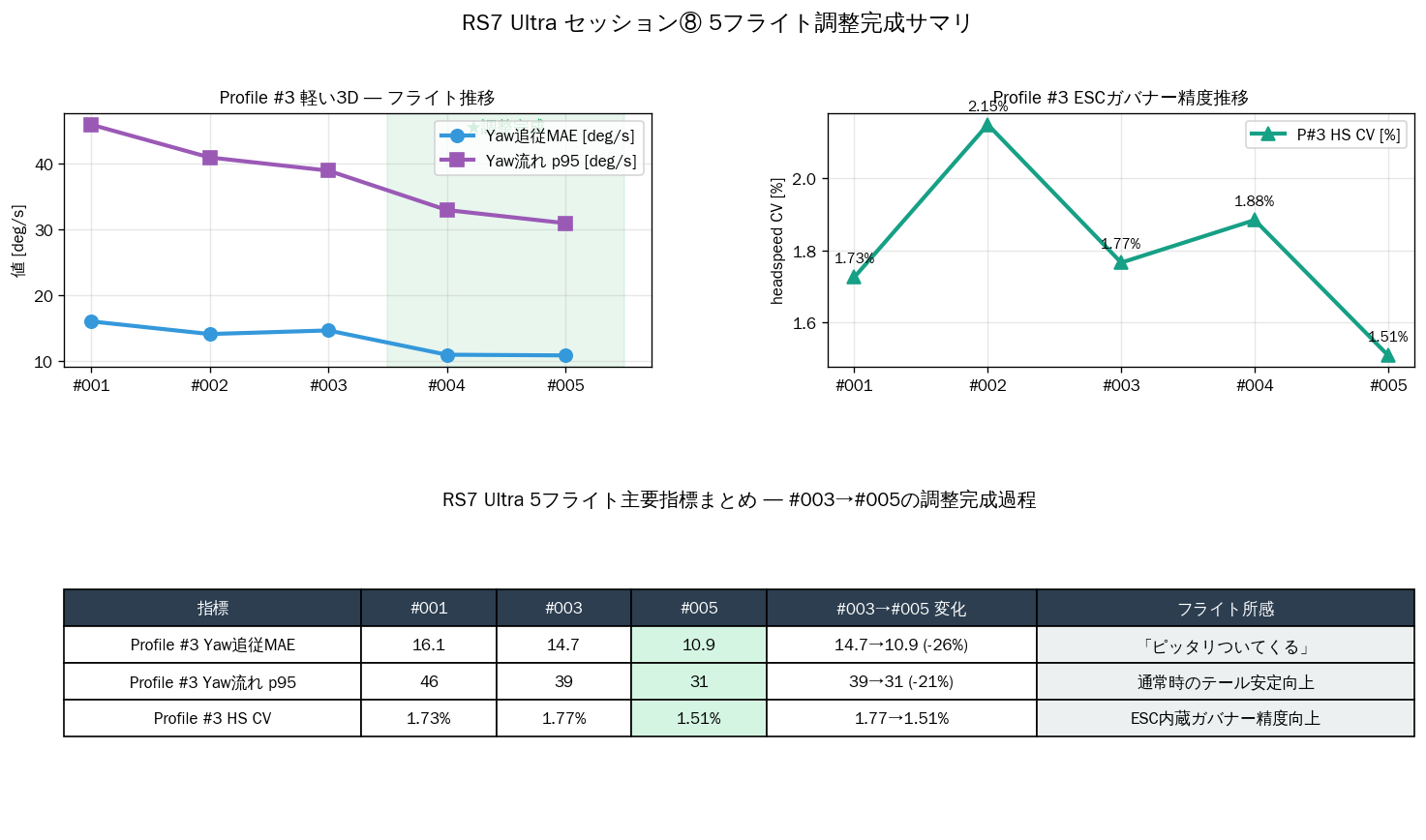
⑧ RS7 Ultra 5フライト調整完成サマリ — Profile #3 主要指標推移と #001/#003/#005 比較表
📋 次回フライト試行項目(RS7 Ultra)
- 継続中 Cyclic Ring 110:すでに本セッション後にProfile #2/#3で110に絞り適用済み。次回フライトで効果検証、特にProfile #2/#3で絞りの効果が出やすい範囲を中心に観察
- 次回 Cyclic Ring さらなる絞り検討:110で良好なら100試行も視野。撤退ルール:合わなければ元値へ戻す
- 完了 Profile #3 Yaw調整:Yaw P=110、Yaw F=3、Yaw B=7、Stop 140/120、Collective FF=30 で「ピッタリついてくる」レベルに到達
🟠 JR Forza450 — 解析結果(⑧ #001/#002 / 三重保護効果検証 + ピルエットフリップ実現)
現場変更点(20箇所以上):セッション⑦次回値から各Profileで詰めが入った。主要変更は Profile #3 全軸 P値+5〜+10アップ、Pitch D 20→25 (+5)、Yaw P 70→80 (+10)、Yaw Stop 100/80→110/90、Collective FF 45→35 (-10)。Profile #2も同様にPitch D +3、Yaw Stop +5/+5、Collective FF 50→40 (-10)。Profile #1はYaw P 95→100 (+5) のみ。
三重保護は全Profileで完全維持:Roll D=70、Roll Bandwidth=50、Roll D-term Cutoff=12 はセッション⑦の設計どおり全プロファイルで維持。
フライト所感:「ハンチングは再発なし」「安定感を強く感じた」「ピルエットフリップも安心して飛ばせた」。NEXUS-XR 導入(2025年12月頃)以降の調整課題が解決した本機にとって意義深いフライト。
🔑 13.65Hz共振帯チェック — 三重保護の効果検証
・#001 全帯域peak: 308 (deg/s)²/Hz at 4.39Hz(操縦操作)
・#001 13.65Hz帯(11.65〜15.65Hz)peak: 7.06(全帯域peakの2.3%)
・#002 全帯域peak: 301 (deg/s)²/Hz at 6.84Hz(操縦操作)
・#002 13.65Hz帯 peak: 6.55(全帯域peakの2.2%)
13.65Hz共振帯はむしろ周辺周波数より低い谷となっており、共振由来のピークが見えない。三重保護の物理的設計どおり、13.65Hzでのリミットサイクル発振が成立しなくなったことが確認できる。
主要ピークの内訳:4.39Hz / 6.84Hz は操縦者の意図的操作(フリップ・メトロノーム等周期動作)、58Hz付近は メインローター回転(headspeed 3500rpm = 58.3Hz)の正常な振動。
🔑 ピルエットフリップ実行区間の詳細解析
最有力候補 t=232.5秒付近:
・Yaw Gyro 最大: 603 deg/s(連続的な高速回転)
・Pitch Gyro 最大: 184 deg/s(フリップ動作)
・Collective range: -540〜+149(縦の回転動作で深い負ピッチを使用)
・Roll: ±100 deg/s 程度に収束(規則的振動なし、13.65Hz共振の兆候なし)
・4軸(Roll/Pitch/Yaw/Collective)すべてで setpoint と gyro がほぼ完全に重畳
その他の候補:t=138.0秒(Yaw 600 deg/s + Coll -359〜+304)、t=184.5秒、t=203.7秒など複数。3D演技中のテール挙動が安定した状態で、フライト所感「安心して飛ばせた」を裏付ける。
📊 Pitch P/I peak比の健全化 — 「眠っていたPitch P」の覚醒
セッション⑧ #002(Pitch P 32→38 / +6 後):
・Profile #1: 0.26(健全域近く)
・Profile #2: 0.28(健全域近く)
・Profile #3: 0.21(セッション⑦比4倍以上)
Pitch P値の引き上げにより、Pitch軸でP項とI項の役割分担が健全化。フライト所感「経験則から入れた値がバッチリあっていた」が数値的に裏付けられる。
🔍 Roll Gyro振幅 — ハンチング再発無しの追加検証
・セッション⑦時 Profile #3 共振時: 937 deg/s(13.65Hzの規則的なリミットサイクル発振)
・セッション⑧ #001 Profile #3: 452 deg/s
・セッション⑧ #002 Profile #3: 705 deg/s(演技中のピーク値、規則振動ではなく操縦意図によるフリップ・メトロノーム動作の振幅)
#002の705 deg/sは積極的な3D演技に伴う通常の振幅であり、PSD解析で13.65Hz帯にピークが見えないことから、共振由来ではない。フライト所感「ハンチング再発なし」と整合する。
📊 グラフデータ(⑧ Forza450)
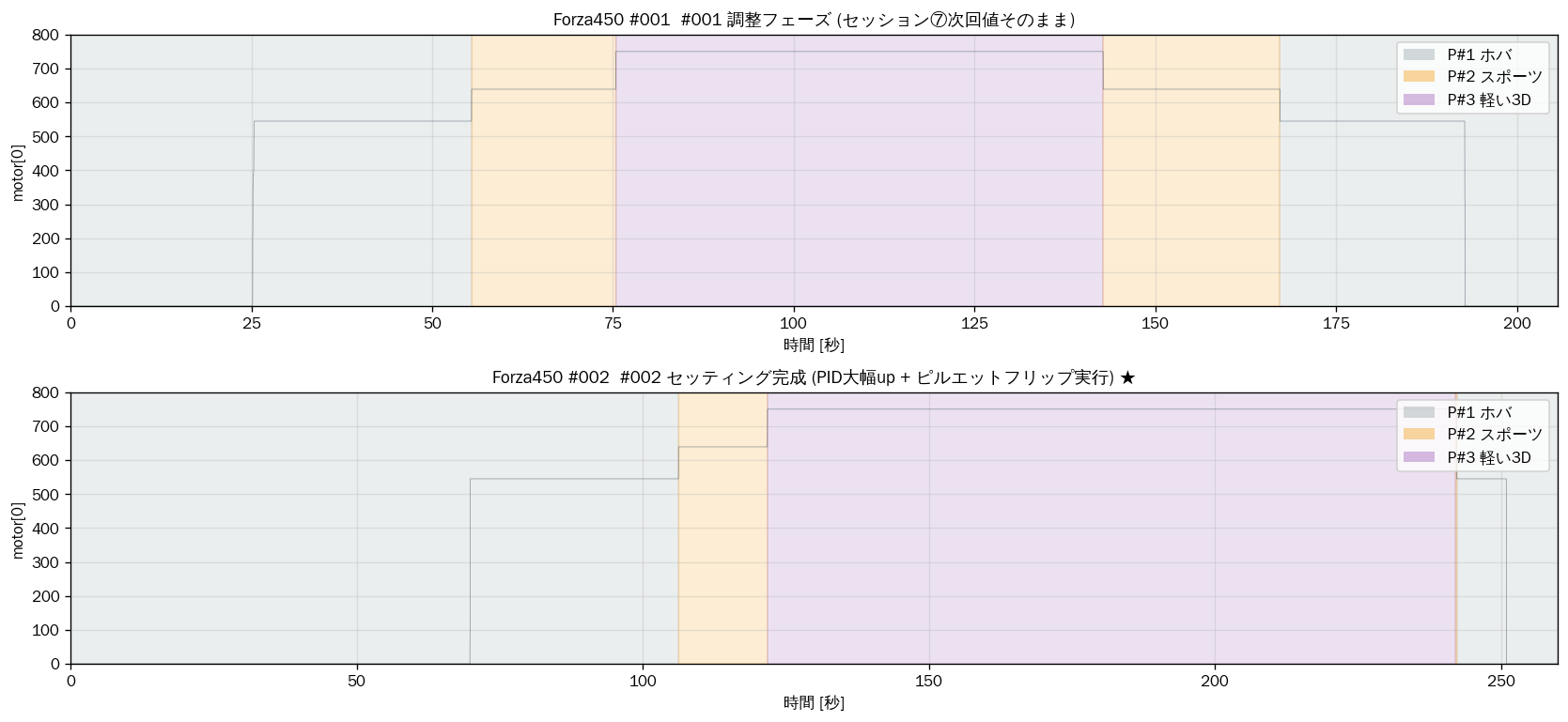
プロファイル時系列 — #001 調整フェーズ vs #002 セッティング完成(Profile #3 が66%を占める3D演技フライト)
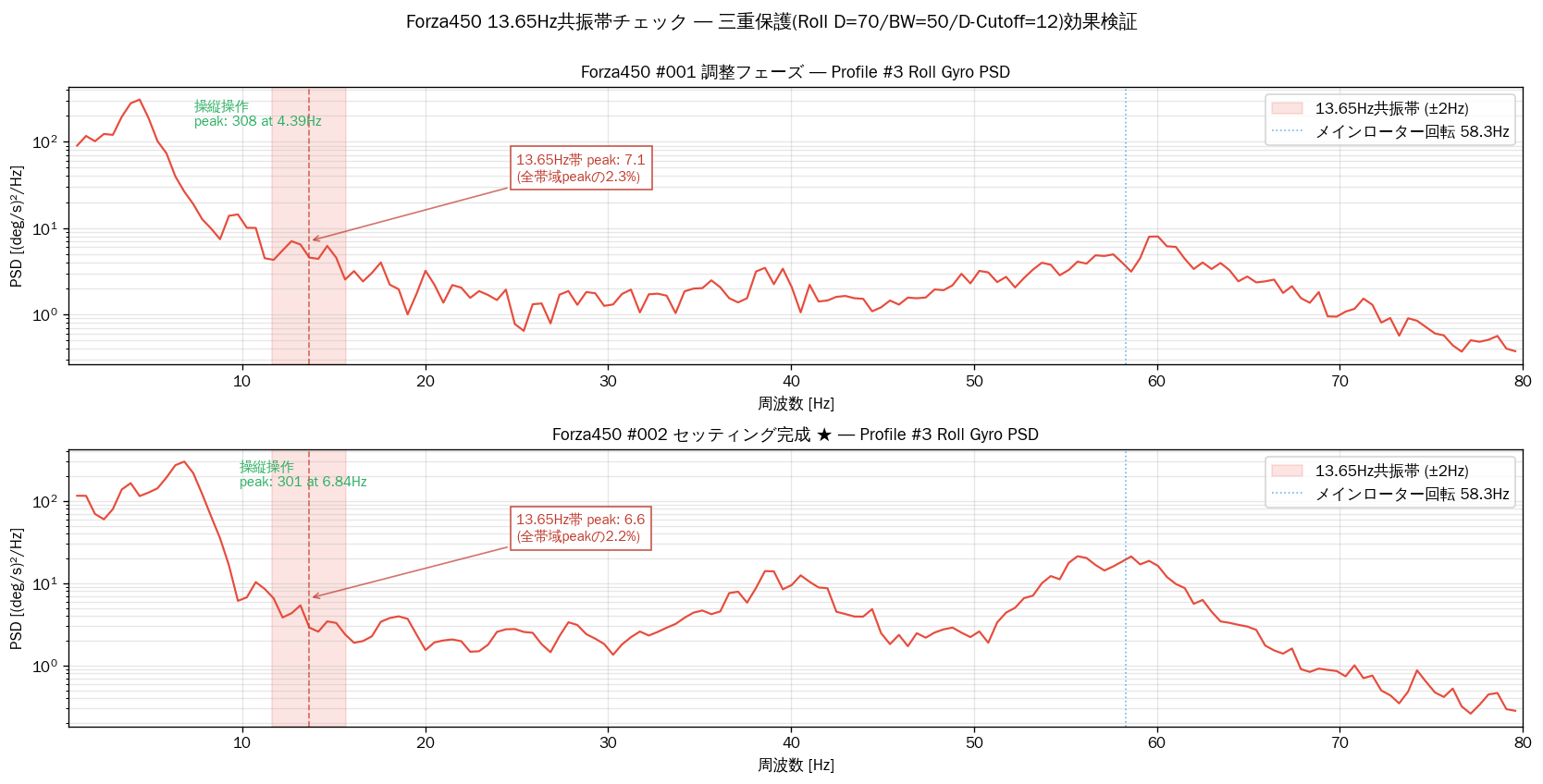
13.65Hz共振帯チェック — Profile #3 Roll Gyro PSD、共振帯(赤色帯)に明確なピーク無し、三重保護の効果が物理的に確認
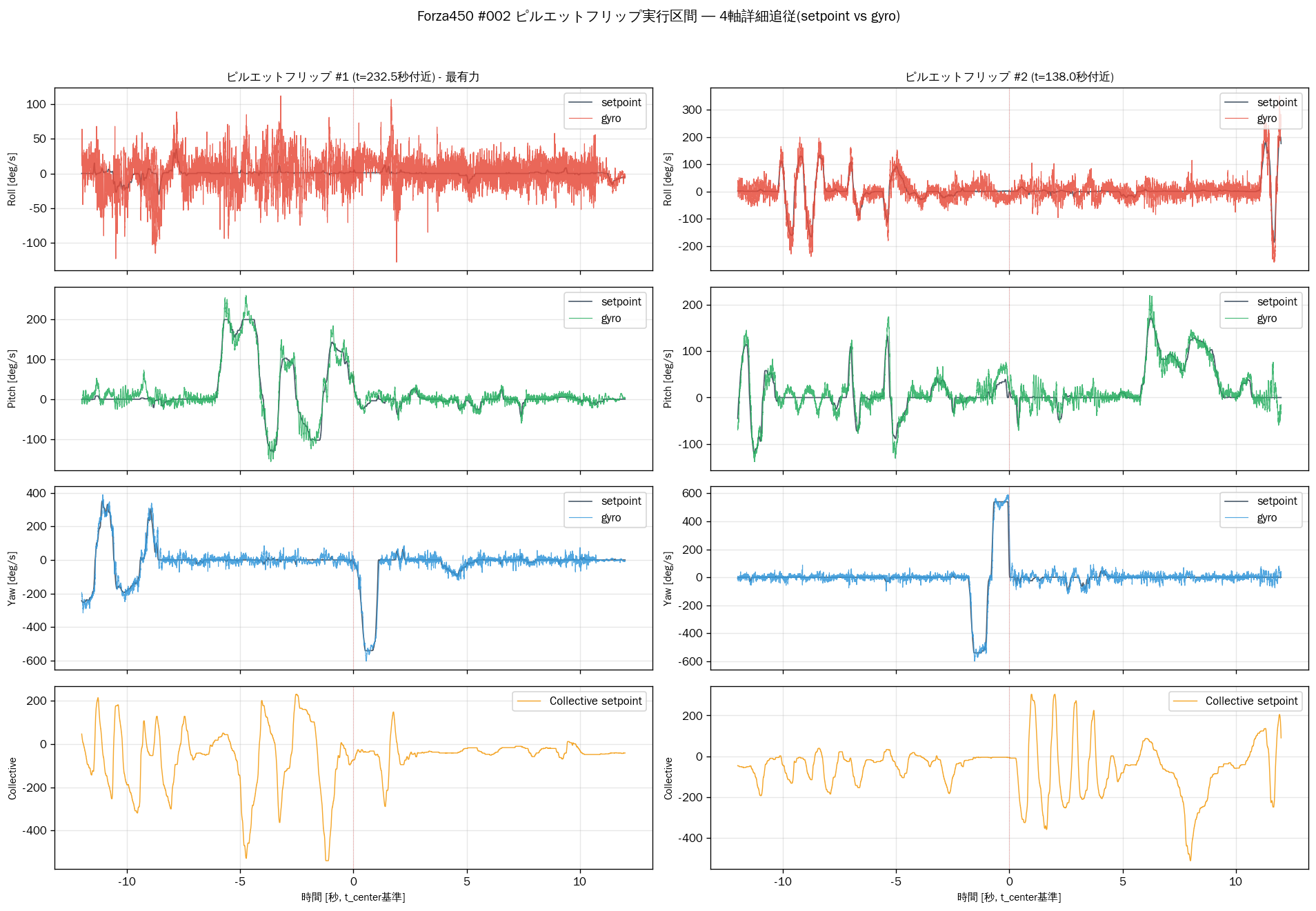
ピルエットフリップ実行区間の4軸詳細 — t=232.5秒・t=138.0秒、Roll/Pitch/Yaw/Collective すべてで setpoint と gyro が重畳
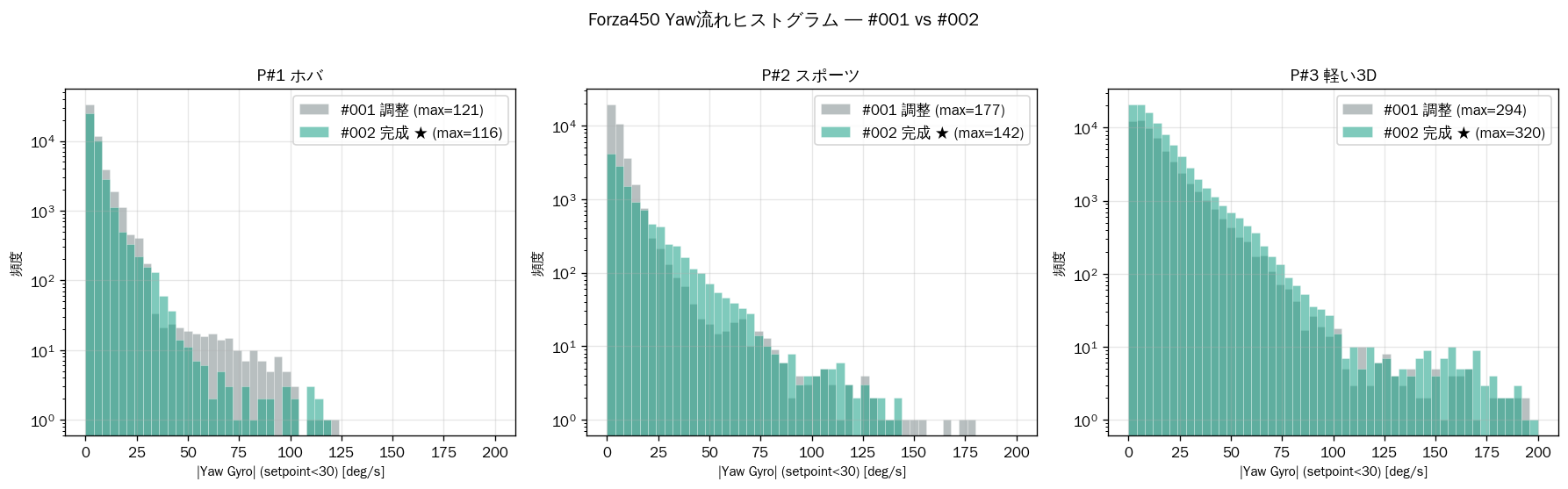
Yaw流れヒストグラム — Profile別、setpoint<30時の|Yaw Gyro|分布
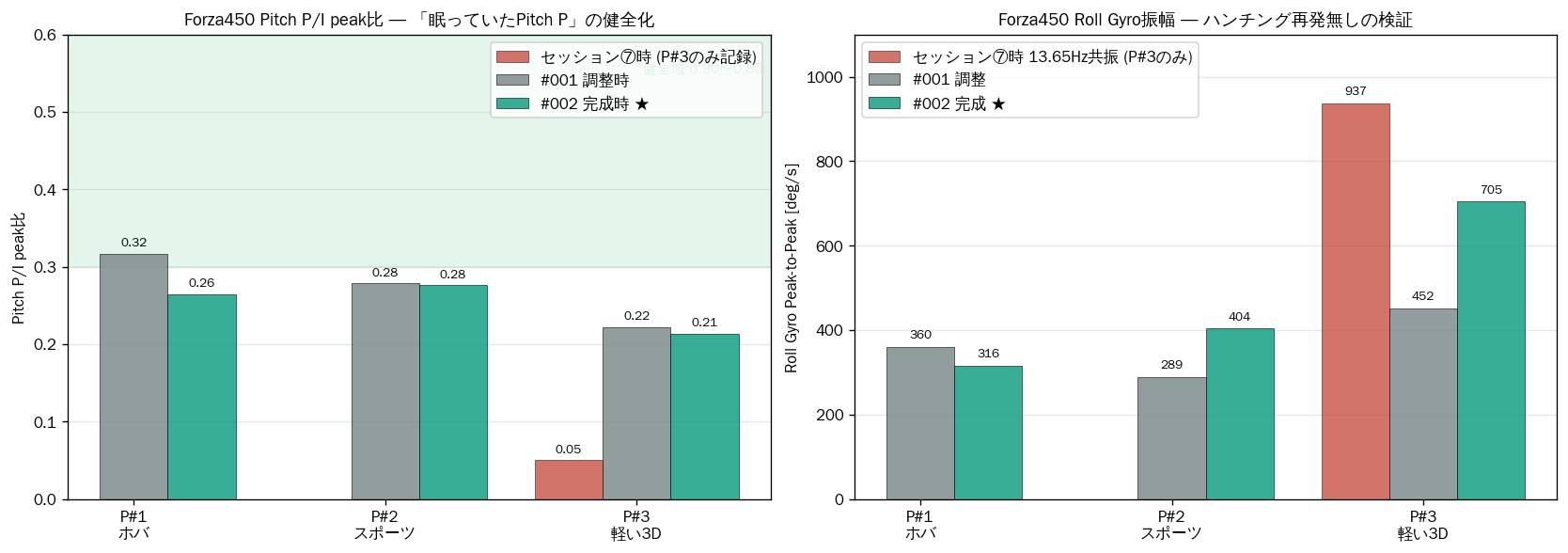
Pitch P/I peak比の健全化(セッション⑦ P#3=0.05 → ⑧ P#3=0.21)と Roll Gyro振幅比較
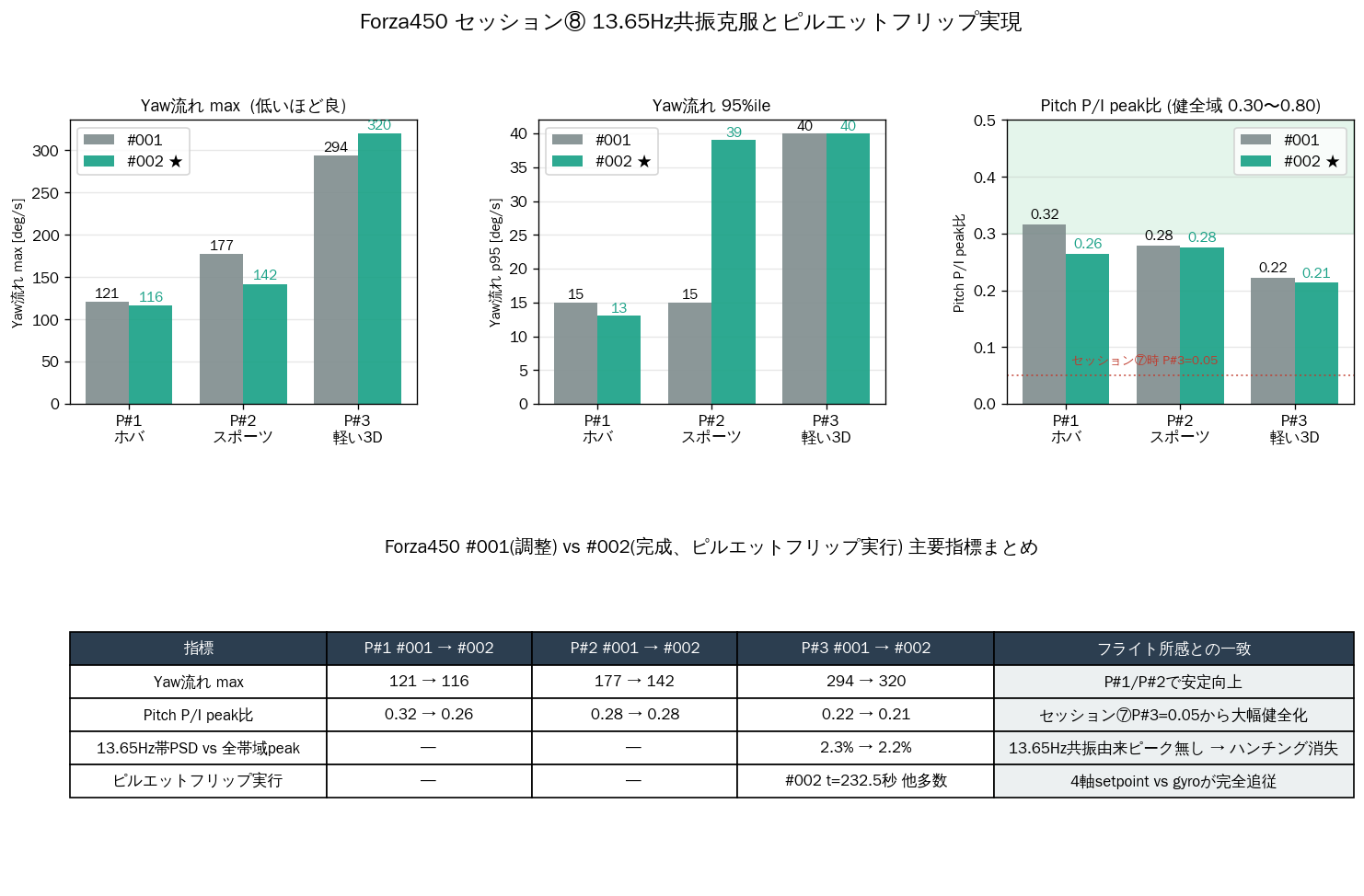
⑧ Forza450 主要指標サマリ — 13.65Hz共振克服とピルエットフリップ実現の総合まとめ
📋 次回フライト試行項目(Forza450)
- 完了 13.65Hz共振の物理的克服:三重保護(Roll D=70 / BW=50 / D-Cutoff=12)の効果を Blackbox PSD で検証、共振帯ピーク消失を確認。NEXUS-XR導入後の調整課題が解決
- 完了 ピルエットフリップ実現:本機での3D機動が安定実行可能に。複数区間で4軸完全追従を確認
- 次回 Cyclic Ring 110 → 100 試行:機体が比較的小型のためすでに110で運用中、さらに絞って100を試行。合わなければ110へ戻す
- 継続中 三重保護は聖域として維持:Roll D=70 / Bandwidth=50 / D-term Cutoff=12 は今後も動かさない設定として固定
🎯 3機総合まとめ — セッション⑧の到達点と今後の方向性
🟢 E8(450class / 8S):機体の調整課題から、操縦者自身に合うセッティングを模索するフェーズへ移行。練習機としての位置づけが確定。
🔵 RS7 Ultra(700class / 12S):5フライトの段階的調整で「ピッタリついてくる」レベルに到達。Profile #2 を遊覧フライト用として活用する哲学的位置づけが確立。
🟠 Forza450(450class / 3S):13.65Hz共振の物理的克服とピルエットフリップ実現。NEXUS-XR導入(2025年12月頃)以降の調整課題が解決。
🔑 3機共通テーマ — Cyclic Ring 絞り試行
原理(現場知見):Cyclic Ring を絞ると、同じ物理スティック量に対するサイクリック実効指令の細分化が進む。最大値を絞ることで「少しの操作量で機体が動く」状態となり、最大ピッチ角を控えめにしても機敏な動きが可能になる。これは「省エネで機敏」を実現する設定方向。
各機の現状値と次回試行値:
・🔵 RS7 Ultra: 110(適用済み)→ 必要なら100
・🟢 E8: 125 → 110
・🟠 Forza450: 110 → 100
共通哲学:機体側ではなく操縦者の操作分解能を上げる方向に揃える。異なる機体スケール(450 / 700)で同一の操作哲学が通用するか、機体ごとに最適値が異なるかを並行検証する探索フェーズ。
📋 解析方針の今後 — 練習主体への移行
・定例的な大規模解析は終了:練習をメインとし、Blackbox解析は「異変・違和感が発生したとき」「明確に上達したとき」など節目で実施する形へ移行
・定例報告型の更新:上達のマイルストーンや新たな機動の習得時にデータを追加する形
・異常検知型の解析:Forza450のハンチング問題のように、現場での違和感が出た場合は即座に解析を実施
セッション⑦で確立した「フライト所感を起点に Blackbox で答え合わせする手法」と、本セッションで確認できた3機の完成度を踏まえ、解析作業から練習作業へ重心を移す。
📋 セッション⑧ 次回フライト試行項目まとめ
- 次回 3機共通テーマ:Cyclic Ring 絞り検証。RS7 Ultra 110、E8 110、Forza450 100。各機で「自分に合う値」を模索
- 継続中 Forza450 三重保護の維持:Roll D=70 / Bandwidth=50 / D-term Cutoff=12 を聖域として固定、ハンチング再発監視は不要
- 継続中 練習主体への移行:定例的な大規模解析を終了、異変検知時または上達のマイルストーン時に解析を実施する形へ
- 完了 3機すべて完成度の高い状態に到達:E8 練習機完成、RS7 Ultra 「ピッタリついてくる」到達、Forza450 13.65Hz共振克服とピルエットフリップ実現
📖 EdgeTX日本語マニュアル
EdgeTX & TX16S 完全日本語マニュアル
RadioMaster TX16S向けのEdgeTX日本語マニュアルです。これから初めて操作する初心者様組や、フタバ・JR PROPOからの乗り換え組にもわかりやすく丁寧な解説を心がけました。
📋 利用規約・著作権について
- 著作権:© 2026 ぽすとそに工房 All Rights Reserved.
- 個人利用:個人での学習・RC活動での利用は自由です。
- 再配布:本マニュアルの無断複製・転載・再配布を禁じます。
- 商用利用:商用利用はご遠慮ください。ただし、YouTubeなどでご紹介いただく際の広告収入は問題ありません(出典元として「ぽすとそに工房」を明記してください)。
- 引用:引用する場合は出典(ぽすとそに工房)を明記してください。
- 免責事項:本マニュアルの内容による損害について、作者は責任を負いません。
※ EdgeTXはオープンソースプロジェクトです。
※ TX16SはRadioMasterの製品です。
※ 各社の商標は各社に帰属します。
📥 PDFダウンロード
EdgeTX日本語マニュアル 完全版
Version 1.0.1 | 全56ページ | 約280KB
発行日:2026年1月
v1.0.2 修正記事
Version 1.0.2 | 全3ページ | 約74KB
発行日:2026年4月
EdgeTX 音声ファイル一覧表
カスタム音声パック自作用リファレンス | 全743ファイル対応
作成日:2025年12月
📖 オンラインマニュアル(目次)
クリックすると各章の内容を展開できます。
1-1. EdgeTXとは何か
EdgeTXは、オープンソースのRC送信機用ファームウェアです。OpenTXから派生し、より活発な開発とユーザーフレンドリーな機能を提供しています。
1-2. OpenTXとの違い
EdgeTXはOpenTXをベースに、タッチスクリーン対応の強化、カラー画面の最適化、新機能の積極的な追加などが行われています。
1-3. フタバ・JR PROPOとの違い
フタバやJR PROPOは「専用システム」として、機種ごとに専用の機能が用意されています。一方EdgeTXは「汎用システム」として、白紙から自分で設定を構築します。
1-4. EdgeTXの設計思想
「何も決まっていない」からこそ、どんな機体にも対応できる柔軟性があります。フライトモード、ミキサー、カーブなど、すべてを自分で組み立てます。
2-1. TX16Sの概要
RadioMaster TX16Sは、EdgeTXを搭載したコストパフォーマンスの高いプロポです。タッチスクリーン、マルチプロトコル対応など、高機能な仕様を備えています。
2-2. 電源を入れる
電源ボタンの長押しで起動します。初回起動時には各種警告が表示されることがあります。
2-3. 言語設定
SYSキー → 歯車マーク → 言語設定で日本語を選択できます。
2-4. 音声設定と日本語音声の導入
日本語音声パックの導入方法、音量調整、音声ファイルの差し替え方法を解説します。
2-5. 画面設定
バックライト、輝度、テーマの設定方法を説明します。
2-6. スティックキャリブレーション
正確な操作のために、スティックのキャリブレーションを行います。
3-1. モデルとは何か
EdgeTXにおける「モデル」とは、1つの機体に対する設定の集まりです。複数のモデルを保存して切り替えられます。
3-2. モデルの新規作成
MDLキーからモデル一覧を開き、新しいモデルを作成する手順を解説します。
3-3. SETUP画面の説明
モデル名、画像、タイマー、RFモジュール設定など、SETUP画面の各項目を説明します。
3-4. INPUTS(入力)の基本
スティックやスイッチの入力を設定するINPUTSページについて解説します。
3-5. OUTPUTS(出力)の基本
サーボへの出力を設定するOUTPUTSページについて解説します。
4-1. ミキサーとは何か
ミキサーは、入力(スティック・スイッチ)を出力(サーボ・ESC)に変換する中核機能です。
4-2. MIXESページの構造
チャンネルとミキサーラインの関係、各設定項目の意味を解説します。
4-3. ミキサーラインの作成
Source、Weight、Offset、Switch、Curveなどの設定方法を説明します。
4-4. Mltpx(ミキシングモード)
Add(加算)、Multiply(乗算)、Replace(置換)の使い分けを解説します。
4-5. ヘリコプター用ミキサー設定例
エルロン、エレベーター、スロットル、ラダー、ピッチの基本設定例を紹介します。
5-1. フライトモードとは何か
フタバ・JR PROPOの「コンディション」に相当する機能です。ノーマル、アイドルアップ1、アイドルアップ2などを切り替えます。
5-2. フライトモードの設定方法
FLIGHT MODESページでの設定手順、名前・スイッチ・トリムの設定を解説します。
5-3. フライトモードとスイッチの連動
SEスイッチやSAスイッチを使った3モード切り替えの設定例を紹介します。
5-4. カーブ(CURVES)とは何か
Expo、カスタムカーブの概念と使い方を説明します。
5-5. カーブの作成方法
ピッチカーブ、スロットルカーブの作成手順と設定例を紹介します。
5-6. フライトモードとカーブの連携
フライトモードごとに異なるカーブを適用する実践的な設定方法を解説します。
6-1. シミュレーターとは
シミュレーター練習の重要性と、主なシミュレーターの紹介(HELI-X、RealFlight、VelociDrone、Liftoffなど)。
6-2. TX16SとPCの接続方法
USBケーブルでの接続、ジョイスティックモードの設定方法を解説します。
6-3. HELI-Xの設定例
ヘリコプター専用シミュレーターHELI-Xの設定手順を詳しく説明します。
6-4. その他シミュレーターの設定
RealFlight、VelociDrone、Liftoffなどの設定ポイントを紹介します。
6-5. シミュレーター練習のコツ
効果的な練習方法、段階的な上達のステップ、実機への移行について解説します。
A-1. 送信機が起動しない・フリーズする
電源が入らない、起動途中でフリーズする場合の原因と対策。
A-2. 送信機とPCが接続できない
USBケーブルの問題、USBモードの設定、ドライバーの問題など。
A-3. 受信機とバインドできない
バインドモード、プロトコル設定、レシーバー番号の問題と解決方法。
A-4. サーボ・モーターが動かない
MIXES設定の確認、チャンネルモニターでの診断方法。
A-5. 設定が保存されない・消えてしまう
SDカードの問題、バックアップの重要性、復旧方法。
A-6. 画面表示がおかしい
画面が映らない、タッチパネルの問題、文字化けの対処法。
A-7. 音声案内が出ない・おかしい
音声ファイルの確認、日本語音声の導入、音量設定。
A-8. ファームウェアアップデートの問題
アップデート前の準備、ブートローダーモード、復旧方法。
A-9. よくある設定ミスと解決方法
リバース設定、スイッチ条件、タイマーリセット(SPECIAL FUNCTIONS活用)など。
📝 更新履歴
- 2026年4月26日 - Version 1.0.2 公開
- 2026年1月1日 - Version 1.0.1 公開(初版)
💬 フィードバック・誤字脱字報告
マニュアルの内容に関するご意見、誤字脱字のご報告は、お問い合わせフォームまたはX(Twitter)からお願いいたします。
📖 Rotorflight日本語マニュアル
Rotorflight Configurator 2.2.1 完全日本語マニュアル
RCヘリコプター専用フライトコントローラー設定ソフトウェアの完全解説マニュアルです。Rotorflightを初めて使う方、従来のRCヘリ用ジャイロから移行する方、設定項目の意味を理解したい方に向けて作成しました。
📋 利用規約・著作権について
- 著作権:© 2026 ぽすとそに工房 All Rights Reserved.
- 個人利用:個人での閲覧・学習目的での使用は自由です。
- YouTube等:動画での紹介・解説(収益化含む)は可能です。事前にお問い合わせよりご連絡ください。
- 再配布:無断転載(SNS・ブログ等への全文コピー)、商用目的での再配布・販売を禁じます。
- 免責事項:本マニュアルの内容による損害について、作者は責任を負いません。
※ Rotorflightはオープンソースプロジェクトです。
※ NEXUS-XRはRadioMasterの製品です。
※ 各社の商標は各社に帰属します。
📥 PDFダウンロード
Rotorflight Configuratorの全体像と各タブの基本的な操作の流れをまとめた概要ガイドです。初めてRotorflightに触れる方や、全体の構成を把握したい方に向けた入門用マニュアルです。
Rotorflight Configurator 2.2.1 日本語化マニュアル ver1.0(第一版)
Version 1.0.0 | 全63ページ | 約1.2MB
発行日:2026年1月
第一版の内容をさらに掘り下げ、Configuratorの各セクション(タブ画面)ごとに、設定項目の数値の意味や効果を日本語で詳しく解説したマニュアルです。英語表記の設定画面を日本語で理解したい方、より細かいチューニングを行いたい方に向けて作成しました。
※ 必要なセクションだけを個別にダウンロードできます。
Status編
ステータス画面 ― FC情報・ジャイロプレビュー・アーミング状態の確認
Setup編
初期設定 ― キャリブレーション・バックアップ・リストアの手順
Configuration編
基本構成 ― 機体タイプ・テールローター・ボード設定の詳細
Presets編
プリセット ― 機体別プリセットの適用と管理
Receiver編
受信機設定 ― プロトコル選択・チャンネルマップ・RSSI設定
Failsafe編
フェイルセーフ ― 信号喪失時の動作設定と安全対策
Power編
電源・バッテリー ― 電圧/電流センサーの設定とキャリブレーション
Motors編
モーター設定 ― ESCプロトコル・テレメトリ・ガバナー設定
Servos編
サーボ設定 ― サーボの割当・トラベル・リバース・速度設定
Mixer編
ミキサー ― スワッシュプレート設定・ブレード角度キャリブレーション
Gyro編
ジャイロ設定 ― フィルター・RPMフィルター・ダイナミックノッチ
Rates編
レート設定 ― 操縦感度・回転レート・エキスポの調整
Profiles編
プロファイル ― PIDチューニング・レスキュー・ヘッドスピード管理
Modes編
フライトモード ― ARM・レスキュー・スタビライズモードの設定
Adjustments編
調整スロット ― AUXチャンネルによるパラメータ動的変更
Beepers編
ビープ音 ― 各種警告音・通知音の有効化と設定
Sensors編
センサー ― 各種センサーの有効化・トレンド表示・動作確認
Blackbox編
ログ記録 ― フライトログの記録設定とデータ分析
CLI編
コマンドライン ― CLIコマンドによる設定・バックアップ・リストア
📖 オンラインマニュアル(目次)
クリックすると各章の内容を展開できます。
Rotorflightは、RCヘリコプター専用に設計されたオープンソースのフライトコントロールソフトウェアです。Betaflightをベースに、ヘリコプターの特性に合わせて大幅にカスタマイズされています。主な特徴、構成要素、従来のジャイロとの違いについて解説します。
RadioMaster製のNEXUS-XRフライトコントローラーの基本仕様、各部写真、端子説明について解説します。STM32F722RET6 MCU、ICM42688Pジャイロ、内蔵ELRS 2.4GHz受信機などを搭載した高性能FCです。
Rotorflight Configuratorを起動すると最初に表示される画面です。上部ヘッダーエリア、接続設定、メインボタン、左サイドメニュー、ダウンロードリンクについて解説します。
Rotorflightの公式ドキュメントやサポートリソースへのリンク集です。Wiki、GitHub、Discord、Facebookグループなど、困ったときの情報源を紹介します。
Rotorflight Configurator自体の設定画面です。表示言語、ダークモード、シリアルポート設定、Expert Modeなどを変更できます。
Rotorflight Configuratorのプライバシーポリシー(個人情報保護方針)について解説します。収集される情報とデータの使用目的を説明します。
FCにRotorflightファームウェアを書き込む画面です。書き込み手順、DFUモードへの入り方、オプション設定、注意点について詳しく解説します。
FCの現在の状態をリアルタイムで確認できる画面です。ARM禁止フラグ、3Dモデル表示、受信機入力値、ステータスバーについて解説します。
FCの基本セットアップを行う画面です。加速度センサーの校正、設定リセット、バックアップ/リストア、ボード取り付け方向の設定について解説します。
ヘリコプターの基本設定を行う重要な画面です。3軸/6軸モード、ミキサータイプ、スワッシュプレートタイプ、センサー設定、モータープロトコル、各種機能について解説します。
プリセット(事前設定)を適用・管理する画面です。機体に合わせた推奨設定を簡単に適用できます。プリセットソース、適用方法、カテゴリについて解説します。
受信機の設定を行う画面です。受信機モード(SBUS, CRSF等)、チャンネルマップ、スティック設定、RSSIソースについて解説します。
フェイルセーフ(信号喪失時の動作)を設定する非常に重要な画面です。スイッチアクション、チャンネル設定、Stage 2設定、テスト方法、Rescue機能との連携について解説します。
バッテリー電圧の監視や電流センサーの設定を行う画面です。電圧ソース、セル数、容量、電流センサー、警告設定について解説します。
モーター(ESC)の設定を行う画面です。モーター設定、ガバナー機能、スロットルキャリブレーション、モーターテスト、ESCテレメトリーについて解説します。
サーボの設定を行う画面です。サーボチャンネル、中立位置調整、動作範囲制限、リバース、更新レート、サーボテストについて解説します。
スワッシュプレートとテールローターのミキシングを設定する画面です。スワッシュプレートミキサー、サーボ方向、スワッシュ方向、テールローターミキサーについて解説します。
ジャイロ(角速度センサー)とフィルターの設定を行う画面です。ジャイロ設定、ローパスフィルター、ノッチフィルター、RPMフィルター、ダイナミックフィルターについて解説します。
スティック操作に対する機体の反応速度(レート)を設定する画面です。レートプロファイル、Roll/Pitch/Yaw/Collectiveレート、Expo、レートタイプについて解説します。
PID設定やその他のチューニングパラメータを保存するプロファイル画面です。PIDプロファイル、PIDコントローラー、PID調整の基本、Feedforwardについて解説します。
各種モード(ARM、Rescue、プロファイル切り替え等)をAUXチャンネルに割り当てる画面です。3軸/6軸モード、主要なModes、Angle/Horizon/Acro Trainerモードについて解説します。
送信機のダイヤルやスライダーを使って、飛行中にリアルタイムで各種パラメータを調整できる機能です。Adjustmentスロット、調整可能なパラメータ、Luaスクリプトとの違いについて解説します。
ブザー(ビーパー)の設定を行う画面です。各種イベントに対してブザー音を鳴らすかどうかを設定できます。NEXUS-XRでのブザー使用方法についても解説します。
各種センサーの値をリアルタイムで確認できる画面です。ジャイロスコープ、加速度センサー、気圧センサー、デバッグ情報について解説します。
フライトログ(Blackbox)の設定を行う画面です。Blackbox設定、ログデバイス、記録頻度、使い方、Blackbox Explorerでの分析について解説します。
コマンドラインインターフェース(CLI)の画面です。基本コマンド、diff/dumpでのバックアップ、設定変更、便利なコマンド、設定リストア手順について解説します。
Rotorflightで使用される専門用語の解説です。基本用語(FC、ARM、DISARM等)、ヘリコプター用語(スワッシュプレート、コレクティブ、ガバナー等)、制御用語(PID、Rate、Expo等)、通信用語(SBUS、CRSF、DSHOT等)、センサー用語、機能用語、略語一覧を掲載しています。
📝 更新履歴
- 2026年2月8日 - Version 1.1 公開(第二版)
- 2026年1月28日 - Version 1.0 公開(初版)
💬 フィードバック・誤字脱字報告
マニュアルの内容に関するご意見、誤字脱字のご報告は、お問い合わせフォームまたはX(Twitter)からお願いいたします。
📚 ラジコン機器の日本語マニュアルPDF集
ラジコン機器の設定、もう迷わない
海外製品で日本語マニュアルがない、日本語で書かれていても難解で敷居が高い ― そんな機器の設定項目を、できるだけ分かりやすくまとめたPDF資料集です。自分自身も調べながら作成したものですので、誤りがあればぜひご連絡ください。
📋 利用規約・著作権について
- 著作権:© 2026 ぽすとそに工房 All Rights Reserved.
- 個人利用:個人での閲覧・学習目的での使用は自由です。
- YouTube等:動画での紹介・解説(収益化含む)は可能です。事前にお問い合わせよりご連絡ください。
- 再配布:無断転載(SNS・ブログ等への全文コピー)、商用目的での再配布・販売を禁じます。
- 免責事項:本資料の内容による損害について、作者は責任を負いません。
※ 各製品名・商標は各メーカーに帰属します。
※ 本資料は公式マニュアルの代替ではありません。正確な情報は各メーカーの公式資料をご確認ください。
🔋 ESC(アンプ)の設定まとめ
HOBBYWING Platinum ESC シリーズ 設定項目一覧
Platinum ESCの全設定項目(Flight Mode、ガバナーP/I、カットオフ、BEC電圧など)を日本語で解説。3-in-1プログラムボックス対応。ヘリコプター用推奨設定つき。
🎛️ ジャイロ・FCの設定まとめ
📝 準備中です。今後追加予定ですのでお楽しみに!
⚡ 配線・電装のまとめ
📝 準備中です。今後追加予定ですのでお楽しみに!
📻 ELRSについて
ELRS 入門ガイド 〜初めて学ぶ人が知らなければならないこと〜
ELRSの基本概念から、パケット構造・チャンネルモード・ヘリコプター向け設定まで解説。Rotorflightでのチャンネルマッピング変更手順、バージョン管理の注意点も収録。
📡 各種アップデート用設定まとめ
Rotorflight 4.6.0 正式版アップデート ぽすとそに流ガイド(RF2.3移行)
Rotorflight 4.6.0(RF2.3)正式版への移行手順を解説。RC3→正式版/安定版(2.2.1)→正式版の両差分、バックアップ→更新→復元の5ステップを収録。RF Tool非常用・ESCガバナー・Mode 4 experimentalなど、ぽすとそに流の運用知見も掲載。設定を引き継いだまま安全にアップデートしたい方向け。
ELRS 4.0.1 更新情報まとめ(v4.0.0→v4.0.1)
ExpressLRS 4.0.1への更新内容を解説。SX1280のTX/RX FIFO分離(Rotorflightフェイルセーフ・再接続不能問題の修正)、TX16S/Zorroの出力正常化、SubGHz規制ドメイン表示・ESP32C3パルスなしフェイルセーフの修正。誰に該当するかの判定表、開発者への感謝・自己責任の方針も収録。
EdgeTX v2.12.0 変更点まとめ(v2.11.5→v2.12.0)
EdgeTX v2.12.0 "Queen Anne's Revenge" の変更点をまとめた資料。STM32F2機のサポート終了、TX16S MK3対応、UIテーマ対応、起動高速化、CRSF速度制限修正、Companion改善など。TX16S Mk2ユーザー向けの影響まとめも収録。
ELRS 4.0.0 ファームウェアアップデートガイド(USB・Wi-Fi両対応)
ExpressLRS 4.0.0へのアップデート手順を解説。USB方式(EdgeTX Passthrough / Betaflight Passthrough)とWi-Fi方式の両方に対応。送信機・受信機それぞれの手順、Luaスクリプトの更新、トラブルシューティングまで収録。
📦 個人の問題解決のためのPDF配布
ボランティア活動でサポート中のお客様向けに、個別の問題解決用PDFを配布しています。
該当する方はご自由にダウンロードしてお使いください。
XK K170 × TX16S 内部4in1モジュール更新ガイド
MULTI-Module ファームウェアを v1.3.4.31 に更新し、XKK170 プロトコルを有効にする手順書。SDカード経由でのフラッシュ手順、成功後の確認方法、エラー対処法を収録。
🎮 AIラジコンゲーム開発
Claude AI とともに作ったラジコン普及ゲーム
Claude AI とともに作って勉強してきたラジコン普及を目指したゲームです!ラジコンを知らない人でも楽しめるように設計していたり、ラジコンの知識がある人も唸るようなものまで用意させていただきました!是非プレイ感想などもお待ちしておりますし、Xなどで結果をシェアしていただけるとリプライしにいくこともあります!
🧠 ローカルLLMのAI開発
ラジコンとAIの融合へ —— その第一歩として、ローカルLLMの構築を進めています。
ぽすとそに工房では、ラジコンとAIを融合させるという目標のもと、自分の手元で動くローカルLLM(大規模言語モデル)の構築に取り組んでいます。クラウドに頼らず、自分の環境で動かすことで、AIの仕組みそのものへより深く踏み込み、その洞察を日々学習しています。単に「AIを使う」のではなく、「AIを理解し、育てる」こと。それが、ラジコン文化の次の世代へ技術と知識を繋いでいくための、私たちなりのアプローチです。
💭 はじまりは、ただの好奇心でした
正直に言えば、はじまりは、ただの好奇心でした。可愛いキャラクターが、決められた台詞をなぞるだけのゲームを——本当に人間のように受け答えするAIで超えられたら面白いんじゃないか。AIの仕組みをもっと理解したいという気持ちと、そんなものができたら遊びとして楽しいだろうな、という単純な動機。それが、ローカルLLMに触れてみた最初のきっかけでした。
ところが、手を動かしているうちに、少しずつローカルLLMのことが分かってきました。モデルの選び方、パラメータの詰め方、崩れ方の癖——触れば触るほど、これは「遊びどころの技術」ではないと感じるようになりました。
そして、ある考えが浮かびます。これは、ラジコンの役にも立つのではないか。いや、ラジコンだけじゃない。困っている専門分野や、いま静かに廃れようとしている文化を、AIが助けられるのではないか。
恋愛シミュレーションを超えようとした好奇心が、気づけばもっと大きな問いに変わっていました。ファインチューニングや強化学習で、ラジコンの技術や専門知識をAIに宿せるなら——次の世代へ繋ぐための、新しい手段になるかもしれない。いまは、その「遊びだった現在地」から「役に立つ最終地点」までを、頭の中で一本の線につなぎ直している最中です。
SEKAI
ユーザーと1対1で向き合う、頼れる相談相手
SEKAIは、あなたと一対一で対話する単体のAIキャラクターです。RCに関する疑問や相談に、確かな知識とほんの少しの優しさで応えることを目指して、人格そのものを設計し直しました。
ローカルで動く言語モデルに音声合成と知識検索を組み合わせ、ただ答えるだけでなく、寄り添いながら一緒に考える存在へ。RCの楽しさを、誰かと分かち合うための試みです。
つばさ&なぎさ
姉妹2人の掛け合いを楽しむ、観賞&参加型
つばさとなぎさは、二人で一組のAIキャラクターです。一人のAIでは生まれない「対話」「掛け合い」「視点の違い」を表現するために生まれました。自動で進む二人の会話に、あなたが割り込んで参加することもできます。
二つの人格を一つのモデルで演じ分けるのは、1対1のSEKAIよりずっと難しい挑戦でした。だからこそ、6つのローカルLLMを比べる検証の主役にもなった二人です。
🛠️ 技術スタック・開発記録
ローカルLLMの構築から音声合成、知識検索の統合まで。RTX 4070 Ti(VRAM 12GB)という一般家庭向けのゲーミングPCで、キャラクター会話に最適なローカルLLMを探した検証の記録を公開します。6つのモデルを実際に試した長所・崩れ方・最終的にたどり着いた設定を、そのまままとめました。
ローカルLLMでキャラ会話を作る — 6モデル比較検証レポート
- ・検証した6つのローカルLLMの結果と判定
- ・VRAM 12GBで頭脳と声を同居させる構成
- ・最終的にたどり着いたパラメータと後処理の工夫
※このPDFは日本語のみの対応となります
🛍️ グッズ
📚 無料ダウンロード資料(日本語版)
初心者から中級者まで対応したRC用語集を無料でダウンロードできます!
RC用語集(PDF)
- ・基礎編① - 35個の基本用語
- ・中級編② - 35個のセッティング用語
- ・応用編③ - 55個の競技・専門用語
※このPDFは日本語のみの対応となります
🚧 実物グッズ(準備中) 🚧
オリジナルグッズは現在準備中です。
※このサイトでは商品の販売や注文受付は行っておりません。
🤝 RC支援・サポートについて
RC初心者の方へのサポート
初心者の方たちへの支援
ラジコンを初めて触る人にも優しく丁寧にプランを一緒に試行錯誤します。
修理メンテナンスについて
基礎的なメンテナンスや修理を一緒に行います。高度な修理については、お問い合わせからご連絡お願いします。どうしても出来ないものもありますが、それらの理由なども誠実にお答えします。
あまりにも修理が高額なラジコンや、パーツが別途必要で入手不可という特殊事例は、近場の修理店などを紹介して解決に向かうこともあります。(パーツがすでにあるorパーツを購入できるという条件が既にありましたら、私が直すことも可能です。)
※修理が高額なラジコンの一例:ラジコン飛行機の墜落→メカトラブルの点検+微細な割れの発見+木材の調達+フィルムや塗装直し+乾燥を待つことによる時間のかかる工程+最終チェックと仕上げetc
(詳しくはお問い合わせください。)
操縦技術の向上
私もまだ若輩者なので、全ての操作ができるわけではありません。しかし、タミグラやF3A、スポーツフライトについては少々理解のある方かと思われます。(操縦技術は大目に見ていただけると助かります。)
その人に合った最適な練習方法や、欲しい商品と自分の手持ちのラジコンを比較しながらの向上練習or商品の購入順番の最適化をAIを活用しながら、最後に笑顔になれるように尽力します。
※ラジコン飛行機とラジコンカー、どちらも好きだけど、どちらも中途半端だからどのようにそれぞれ時間を割くのが自分には向いてたりするんですか?
→〇〇に何割、〇〇に何割、自分との心次第では一部変わりますが、恐らく納得いくのではないかと思われる形は〇〇な状態かと思われます!ですので、今は〇〇が必要ではなく実は〇〇の考え方が重要かもしれませんので、時間をかけてゆっくり練習しましょう!〇〇週間後に自分ここまでできた、などありましたら、〇〇を購入してみるのもまた一つの手かもしれませんね(*´ω`)
などという形式で、一人ひとりに向き合います。(お助けにならなかったり、過度に干渉してしまった場合は大変申し訳ございません。いつでもおっしゃっていただければ、本音は真剣に受け止めます。)
詳細はお問い合わせください
🎉 サポートを受けた方の声
実際にサポートを受けてくださった方々の体験談です。ホームページ開設にあたり、ご協力いただきました。
Yさんの体験談
10代・未経験・陸モノ(バギー)個人的には、バギーの中でも旧車が好きでした。しかし、旧車にはパーツ問題などが多く初めていいものか分かりませんでした。しかし、新旧合わせてパーツを確保し今では練習には2台とも愛車になりました。難しいアンプのセッティングも場所を変えてPCから操作方法を学び、自分でもできるようになりました。いつも一緒に走ってくれたり、コツなども伝えてくれて感謝の限りです。
Oさんの体験談
50代・復帰者・陸モノ&空モノ突然の飛び込みの修理で、原因が初期不良で購入店にあることが分かり、すぐに購入店に新品に交換してもらえました。それからは各種設定や久しぶりのラジコンで浦島太郎状態なのにも関わらず、今のラジコンについての知識を精一杯教えてもらい、四苦八苦ではありましたがなんとか覚えることが出来ました。今では次のステップである飛行機を飛ばすために相談を続けていますが、LINEなども使ってメールよりも迅速にお返事がくるので解決が早く嬉しいです。今度飛ばすときは是非ご一緒していただきたいです。ありがたい限りです。
Kさんの体験談
60代・経験者・空モノ(飛行機、ヘリ)経験していても、情報についていくことが難しく、どのように設定したらいいか分からないときがあります。しかし横で説明書をみながら、私のレベルに合わせた最適なセッティングを出していただき、飛ばしては降りてすぐに調整を繰り返し、私にもできなかったことがすぐに理解できました。お陰様でメインは飛行機でしたがヘリも楽しいものですね、はまってしまいました。まだホバリングぐらいしかできませんが、ここまで歳をとっても新しい発見があることはとても貴重です。有難うございます。
Aさんの体験談
30代・ドローン歴2年・空モノ(ヘリ)ドローンは飛ばしたこともありましたが、ラジコンヘリの難しさは別格です。最初は離陸すら難しく怖がりながらやりましたね。全て1から10まで懇切丁寧に教えていただきありがとうございます。もっと時間のかかる成長しかできないと思っていましたが、仕組みを理解しながら飛ばしていくうちにどんどん安定し、ホバリングと旋回程度なら私にもできます。ぽすとそにさんのような難しいスキルはまだありませんが、いずれ追いついて抜かせるぐらいどっぷりとハマってしまいました笑、ぜひご一緒しながら温かいお茶でも飲み、ラジコン談義しつつ一緒にラジコン楽しみましょう!
Sさんの体験談
30代・未経験・陸モノ最初はバギー一択で大会に出るんだと言いましたね。しかし、私はその気持ちばかり先行し、童心の夢中さを忘れていたようです。もちろん速さもたのしいですが、今の車種にはこんなに振り回しても故障が少ないモデルもあるとは知らなかったです。もちろん私の整備のスキルを上げてくれたことも一因ですね笑。今ではたまに速いバギーを走らせつつ一緒にメンテナンスをしてもらったり、オフロードトラックも頑丈にカスタマイズを自分なりにも進めております。まさかその手があったとは!と毎度驚かされます。若くても知識が豊富過ぎて、私の手の届かない範囲も手助けをしてくださり、いつもありがとうございます。
❓ よくある質問コーナー
皆様からよくいただく質問をまとめました。気になることがあれば、まずこちらをご覧ください。
完全初心者ですが大丈夫ですか?
▼もちろんです。何もわからなくても問題ございません!
ラジコン初心者は、車・飛行機・ヘリのどれから始めるのがおすすめですか?
▼ラジコンの車の電動から始めてみるのが良いと思います。まずはラジコンの費用を抑えて楽しさを感じることが一番の始まりだと思っております!
ラジコンを始めるために最低限必要なものは何ですか?
▼最初は、日曜工具があるといいと思います。noteのブログ記事のほうにて初心者の解説である電動カーについてまとめてありますので、よければそちらも参照してもらえると大変うれしく思います。
ラジコンを始めるには、どれくらいの費用がかかりますか?
▼お問い合わせいただいた内容をもとに、ラジコンを始める際に必要となる費用の目安を一緒に考えます。実際のお買い物はご自身でしていただく形になりますが、「だいたいこれくらいかな?」という基準を決めたり、それらを選ぶときは相談者のレベルに応じたものをベースに致します。「楽しさを広げる」ことをモットーに、無理のないスタートを応援しています!
ラジコンはどこで買うのがおすすめですか?(店舗 vs ネット)
▼最初だけは模型店で購入し、慣れたらネットでも問題ございません。すぐに修理などができるツテを作ることもまた重要なことです。ネットだと、最初の一台のみは後から高くつくことも珍しくありませんので、細心の注意を払いましょう。どうしても金額的にネットのみの購入になる場合は、説明書があると大変良いと思います。
中古のラジコンを買う時の注意点はありますか?
▼できれば、最初は新古品のようなもの、または使用頻度が少ないもので異常に安く売られてないものをオススメします。ご自身のレベルに関係なく、お問い合わせから「この写真の物を買うのは問題なさそうでしょうか?以下URLです。」等とご連絡いただけましたら、レベルに合わせて問題ないかそのページを確認してからお答えします!
ラジコンが動かなくなりました。どこを確認すればいいですか?
▼まずは、マニュアルの不具合対策を読んでみましょう。仮にも中古で購入して分からないときは、最近の説明書はネットからダウンロードすることも可能です。やり方などいまいちよく分からないときは、お問い合わせフォームまでご連絡いただけるとスムーズにお伝えできると思います!
修理にはどのくらい時間がかかりますか?
▼物によりますが、即日出来上がることが多いです。大きいものかつパーツのお取り寄せまでになると、約1か月ぐらいの場合もあります。工程が多いほど要相談です。
古い機体でも対応できますか?
▼可能な限り対応します。(パーツがなくとも自作していく場合もございます。)一例としては、初代タミヤ発売のホーネットを修理し、Uコンの一部も修理しました。
どこで活動していますか?対応エリアは?
▼札幌が基本となります。ネット対応も可能な限り致します。
どんなラジコンに対応していますか?
▼車、飛行機、ヘリ、戦車、トラック、ボート、トイラジ(対象年齢が低いラジコンなどを指します。)です。ドローンは要相談です。
オンラインでも相談できますか?
▼もちろんです。概要を詳しく知りたい、お試しでお問い合わせしてみた、なども是非お待ちしております。
AIってどう使うんですか?
▼最適な機体選びや練習プラン作成に活用します。
一緒に活動できますか?
▼人はたくさんいたほうが活気づくので、あくまでも私と同じく理念を元に活動することも可能です!
クラブへの加入も検討しているのですが…
▼自身に合わせたレベルの近場のクラブの紹介や、近場であれば私の所属しているクラブを紹介することも可能です。私のところのクラブでは、コースや飛行場を利用するにあたってビジター料金などもございますので、お気軽に質問お待ちしております。
🔤 用語集
ラジコンにまつわる「これ何だっけ?」を引くための用語集コーナーです。
まずはラジコン全般の用語集から。今後、分野ごとの用語集も少しずつ増やしていく予定です。
※内容は一般的な解説です。法令や安全基準(航空法・機体重量の基準など)は地域・時期で変わるため、 最新の公式情報・自治体・クラブで必ずご確認ください。
🤝 提携サイト
ぽすとそに工房と提携しているサイトをご紹介します。

RC工房
RC工房は、私がクラブで会長を務めさせていただいている模型店で、サーキットや飛行場が同じ敷地内にあります!随時クラブ員も募集しており、平日にも人が来るような和やかなクラブです。ビジター利用も大歓迎です。私の修理などを培っていただけた長年の付き合いのある店主ですので、ぜひ何か分からないことがあった場合はこちらの方を訪れることもお勧めしております!
📍 住所:
〒002-8054
北海道札幌市北区篠路町拓北7番地1038
📞 TEL: 011-768-7545
📠 FAX: 011-768-7550
✉️ お問い合わせ
📋 お問い合わせからの流れ
フォーム送信
お気軽にご連絡ください
内容確認・ヒアリング
状況を詳しくお聞きします(1〜3日)
アドバイス・ご提案
修理方法や必要なパーツをご案内
作業(対面 or オンライン)
一緒に修理・メンテナンスを行います
完了・アフターフォロー
その後の疑問もお気軽にご質問いただけると幸いです
💡 お問い合わせ前に知っておいてほしいこと
返信時間
通常1〜3日以内(体調により遅れる場合があります)
対応可能なこと
RC修理相談、初心者サポート、機種選びの相談、技術的な質問
費用について
完全無料のボランティア活動です。修理費・相談料等は一切いただきません。
パーツ代について
必要なパーツはご自身でご購入いただきます(購入先のアドバイスは可能)
対応エリア
札幌中心、オンライン相談は全国対応
お問い合わせは以下のフォームからお願いいたします。
RC関連のご質問、修理のご依頼、サポートのご相談など、お気軽にお問い合わせください。
ご返信について
お返事はできる限り早急に対応させていただいておりますが、身体の都合によりご連絡が遅れる場合がございます。ご不便をおかけいたしますが、少々お時間をいただけますとありがたく存じます。
メール受信設定のお願い
お手数をおかけしますが、「@hotmail.co.jp」からのメールを受信できるよう、ドメインの許可設定をお願いいたします。また、迷惑メールフォルダに振り分けられている可能性もございますので、ご確認をお願いいたします。
※このフォームは商業目的ではなく、ボランティア活動に関するお問い合わせ専用です。